딥 러닝 입문
일부 비전 인식 과정에서는 기존의 매칭 및 클러스터링 방법으로 만족스러운 결과를 얻기 어려울 수 있습니다. 예를 들어, 고반사율 물체를 피킹할 때 포인트 클라우드 품질이 낮아 3D 매칭 결과가 부정확할 수 있습니다. 또한, 밀접하게 배치된 물체를 피킹할 때 클러스터링 방법의 결과가 이상적이지 않아 비전 인식과 로봇 피킹에 영향을 미칠 수 있습니다. 이러한 상황에서는 딥 러닝으로 인식 지원을 고려할 수 있습니다.
딥 러닝은 인공 지능 분야에 속하며 복잡한 신경망 모델을 포함합니다. 대량의 데이터가 입력되면 딥 러닝 기술은 인간의 학습 과정을 시뮬레이션하여 데이터에서 패턴을 예측하거나 식별하고, 특징을 추출하여 관련 작업을 수행할 수 있습니다.
Mech-Mind 3D 비전 가이드 로봇의 피킹 분야에서는 인스턴스 세그먼테이션 알고리즘 모듈을 제공합니다. 기존 방법으로 기대하는 결과를 얻지 못할 경우, 인스턴스 세그먼테이션을 활용하여 인식을 지원할 수 있습니다. 다음 내용에서는 다양한 피킹 시나리오에서 인스턴스 세그먼테이션 알고리즘 모듈의 효과를 소개합니다.
디팔레타이징 및 팔레타이징
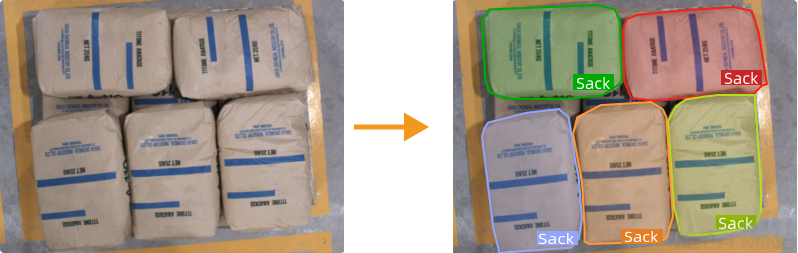
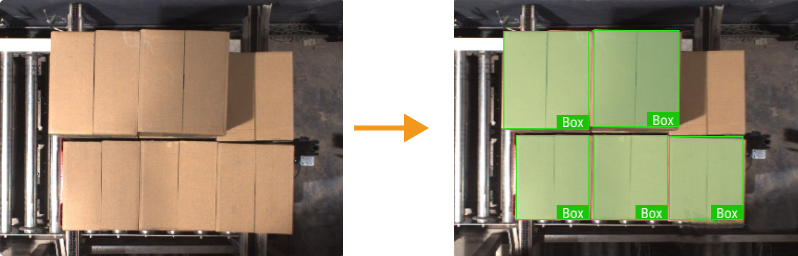
팔레타이징 및 디팔레타이징은 박스, 크레이트, 포대와 같은 물체를 파렛트에서 분리하여 파렛트 또는 관련 설비(예: 개봉 장치, 컨베이어 벨트 등)에 배치하는 작업을 의미합니다. 아래 그림과 같이 서로 밀접하게 배치된 박스와 포대를 분할합니다.