자주 나타나는 문제와 해결 방법
7축 로봇을 캘리브레이션하는 방법
|
여기에서 말하는 7축 로봇은 6축 로봇에 슬라이드 레일이 추가된 로봇을 포함하지 않습니다. |
7축 로봇의 경우 먼저 캘리브레이션을 위해 'TCP 끝단점 터치' 방법을 사용하는 것이 좋습니다.
현장에 적합한 끝단점이 없거나 끝단점을 고정할 수 없는 경우, '여러 무작위 캘리브레이션 보드 포즈' 방법을 사용할 수 있습니다. 캘리브레이션 프로세스 중에 축 중 하나의 움직임을 제한하고 7축 로봇을 6축 로봇으로 이상화해야 합니다. 나머지 작업은 6축 로봇의 캘리브레이션과 거의 동일합니다.
로봇 오일러 각의 유형이 불확실할 때 사용하는 캘리브레이션 방법
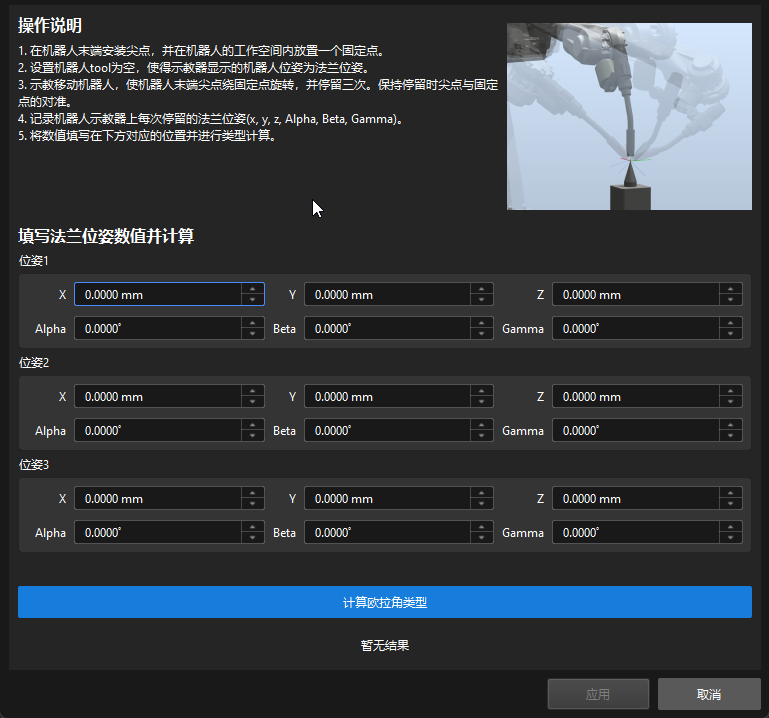
로봇의 오일러 각 유형이 확실하지 않는 경우, 카메라 캘리브레이션의 인터페이스의 “오일러 각 유형 획득하기”를 통해 현재 로봇의 오일러 각 유형을 획득할 수 있습니다. 구체적인 작업은 다음과 같습니다.
-
Mech-Vision 소프트웨어에서 툴 바의 카메라 캘리브레이션 버튼을 클릭합니다. 캘리브레이션 사전 구성 창이 팝업됩니다.
-
캘리브레이션 방법 선택 창에서 새로운 캘리브레이션 시작 라디오 버튼을 선택한 후 다음 버튼을 클릭합니다.
-
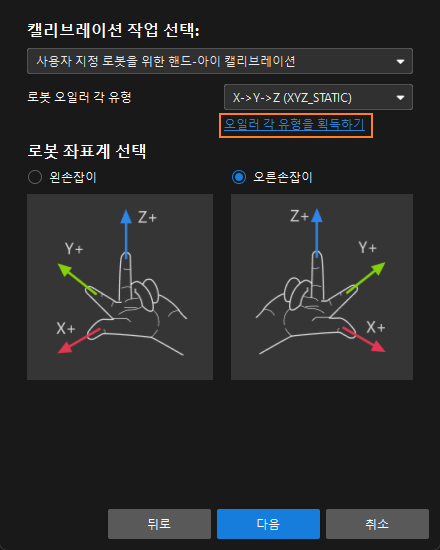
캘리브레이션 작업 선택 창의 드롭다운 목록 상자에서 사용자 지정 로봇을 위한 핸드-아이 캘리브레이션을 선택하고 오일러 각 유형을 가져오기 링크를 클릭하여 도구를 엽니다.
-
도구의 지침에 따라 세 가지 로봇 플랜지 포즈를 기록하고 입력한 다음 오일러 각 유형을 계산하기를 클릭하여 로봇의 오일러 각 유형을 가져옵니다.