캘리브레이션 원리
이 부분에서는 각 시나리오에서의 캘리브레이션의 작업 원리를 소개합니다.
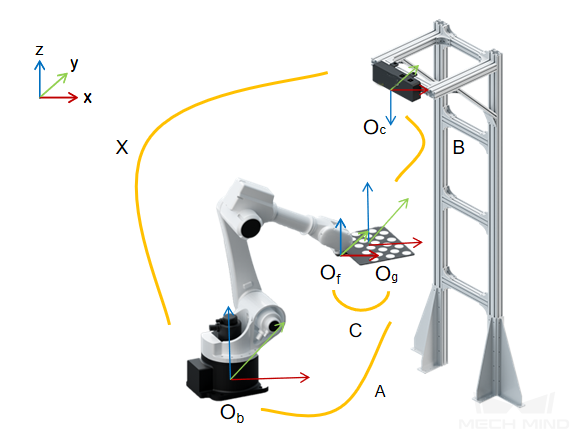
ETH 시나리오에서의 핸드-아이 캘리브레이션(캘리브레이션 보드의 여러 임의 포즈)

알려진 치수의 캘리브레이션 보드가 로봇 플랜지에 설치되고 로봇 베이스 좌표계(Base)에서 A로 표시된 캘리브레이션 보드의 각 원의 좌표를 얻을 수 있습니다. 캘리브레이션 보드의 이미지를 캡처하면 B로 표시된 각 캘리브레이션 원에 대한 카메라 광학 중심의 좌표를 얻을 수 있습니다. 카메라 광학 중심의 베이스 좌표계(Base)와 X로 표시된 로봇 베이스 간의 변환 관계는 미지수입니다. 따라서 A, B, X는 폐쇄 루프를 형성하고, 루프에서 생성된 방정식을 통해 X의 값을 계산할 수 있습니다. 캘리브레이션 보드와 플랜지 끝의 위치 관계 C를 모르는 경우 캘리브레이션 프로세스에서 캘리브레이션 보드 일련의 상대적인 이동을 통해 수치법에 따라 캘리브레이션 보드와 플랜지 끝의 위치 관계를 계산하여 획득할 수 있습니다. 이에 따라 A를 계산할 수 있습니다. 로봇을 움직이고 카메라를 기준으로 캘리브레이션 보드의 포즈를 변경함으로써 여러 방정식 세트를 얻을 수 있으며 이러한 방정식의 값을 피팅하고 최적화하여 최종적으로 최적의 X 값을 얻을 수 있습니다. 포즈 관계는 아래 그림과 같습니다.
EIH 시나리오에서의 핸드-아이 캘리브레이션(캘리브레이션 보드의 여러 임의 포즈)

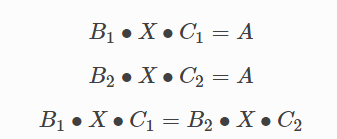
카메라는 고정 프레임을 통해 로봇의 말단에 고정되는데 이때 로봇 말단의 플랜지 중심과 카메라의 광학 중심 사이의 포즈는 상대적으로 고정되어 있습니다. 즉 아래의 그림 중의 알 수 없는 변수 X입니다. 로봇 베이스 좌표계(Base)에 대한 로봇 말단 플랜지 중심의 자세는 알려진 양 B입니다. 캘리브레이션 보드의 사진을 찍음으로써 카메라는 카메라의 광학 중심과 캘리브레이션 보드의 각 점 사이의 포즈 관계를 얻고 알려진 양 C를 얻을 수 있습니다. 캘리브레이션 보드는 카메라 시야의 도달 가능한 영역에 평평하게 배치되며 로봇의 기본 좌표에 대한 포즈 관계는 고정 값 A입니다. 이러한 방식으로 변수 A, B, C 및 X는 폐쇄 루프 관계를 형성합니다. 다음 방정식에서 A는 고정 값이므로 처음 두 방정식을 결합하고 X만 새로 얻은 방정식에서 풀어야 할 미지의 양입니다. 로봇 말단 포즈를 변환하고 다양한 각도에서 사진을 캡처하여 A, B, C 값의 여러 세트를 얻고 이 값을 사용하여 최적의 X 값을 얻기 위한 피팅 계산을 수행합니다.
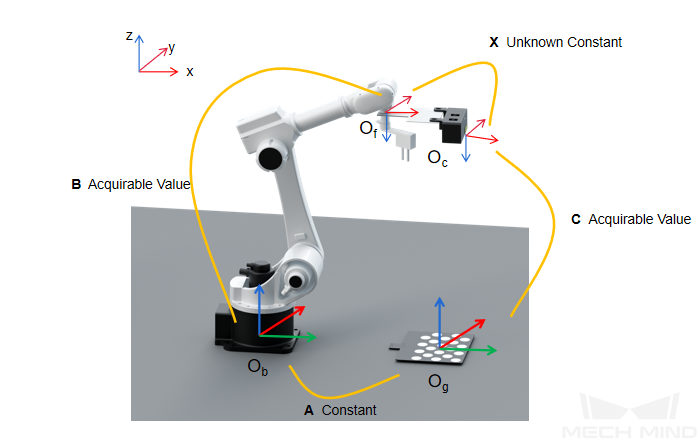
카메라 좌표계와 로봇 플랜지 좌표계의 대응 관계를 계산하는 공식은 아래 그림과 같습니다.
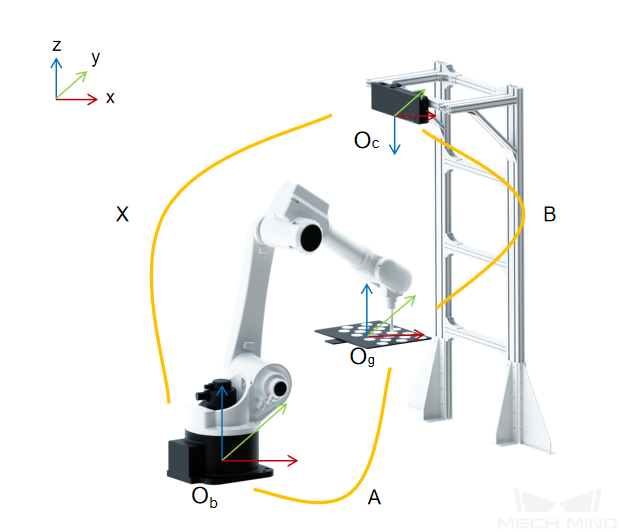
ETH 시나리오에서의 핸드-아이 캘리브레이션(TCP 끝단점 터치)

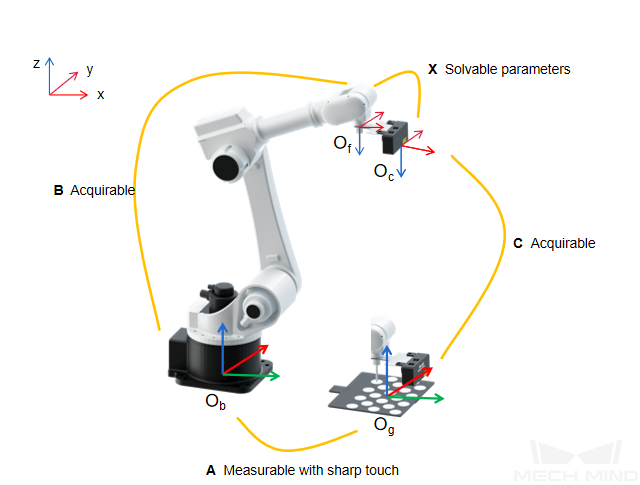
TCP 끝단점 터치 방법을 사용해 캘리브레이션을 하는 경우 캘리브레이션 보드를 물체체 평면에 놓고 알려진 크기의 끝단점을 로봇 말단에 추가하여 캘리브레이션 보드 원의 교차 중심을 터치합니다. 다음 그림과 같이 A와 B의 값을 알 수 있으며, X의 값도 구할 수 있습니다. 캘리브레이션 보드가 플랜지에 고정되어 있지 않은 경우 TCP 좌표가 알려진 끝단점을 사용하여 캘리브레이션 보드에서 캘리브레이션 원의 교차 중심점을 터치하여 A 값을 계산할 수 있습니다.
EIH 시나리오에서의 핸드-아이 캘리브레이션(TCP 끝단점 터치)

TCP 끝단점 터치 방법을 사용하여 캘리브레이션할 때 캘리브레이션 보드를 작업면에 놓고 로봇 말단에 알려진 크기의 TCP 첨점을 설치하고 캘리브레이션 보드의 원점을 터치합니다. 원리는 아래의 그림과 같습니다. 여기서 A, B 및 C를 알고 있으면 X 값도 얻을 수 있습니다.
두 대의 카메라(Eye to Eye) 캘리브레이션
두 대의 카메라를 사용하면 다음 그림과 같이 카메라 시야를 확장하고 두 카메라의 겹치는 부분의 포인트 클라우드 품질을 향상시킬 수 있습니다.
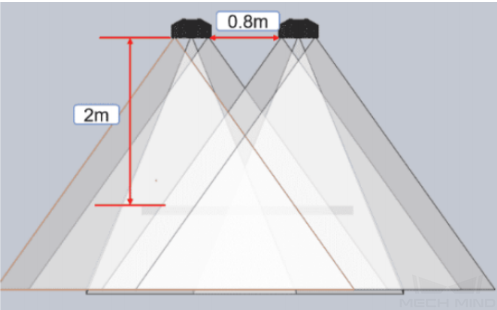
Eye to Eye 캘리브레이션 시나리오에서 두 대의 카메라(하나는 메인 카메라이고 다른 하나는 서브 카메라임)는 스탠드에 고정적으로 장착됩니다. Eye to Eye 캘리브레이션은 두 카메라의 외부 파라미터를 캘리브레이션할 뿐만 아니라 두 카메라 간의 포즈 관계도 캘리브레이션해야 합니다. Eye to Eye 캘리브레이션 시나리오의 경우 Mech-Vision은 표준 Eye to Eye 캘리브레이션 절차를 제공합니다.
|
사용되는 두 대의 카메라는 동일한 해상도를 가져야 하며 카메라 시야(2D 및 3D)의 겹친 구역이 전체 작업 구역을 커버해야 합니다. |
Eye to Eye 캘리브레이션은 캘리브레이션 데이터 수집을 위한 캘리브레이션 보드의 여러 임의 포즈 방법만 지원하며 자동 및 수동 캘리브레이션 모드를 모두 지원합니다.