기본 개념
프로젝트
“프로젝트”는 Mech-Viz 소프트웨어에서 생성된 로봇 경로 계획 항목을 말합니다. Mech-Viz에서 프로젝트에 필요한 모든 구성을 완료하면 이 프로젝트를 통해 로봇의 경로를 계획하고 로봇의 이동을 컨트롤할 수 있습니다. 프로젝트의 모든 구성 사항은 프로젝트와 이름이 동일한 폴더에 저장됩니다.
좌표계
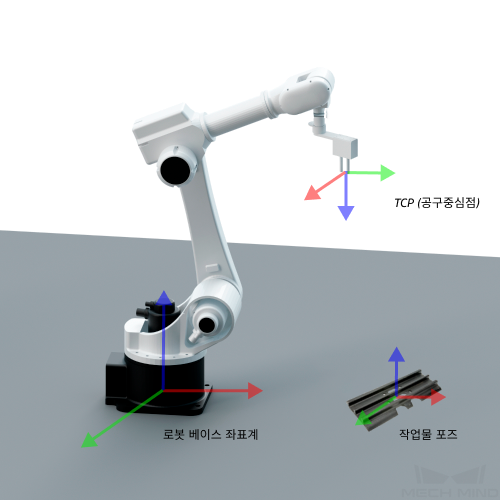
TCP(Tool Center Point)(공구중심점)
TCP는 로봇의 끝 플랜지를 기준으로 말단장치 끝 부분에 위치한 지점의 포즈입니다.
작업물 피킹 등 작업을 수행하기 위해 로봇을 공간의 특정 지점으로 이동시키는 것은 본질적으로 TCP를 해당 지점으로 이동시키는 것입니다.
작업물 대칭성
작업물의 대칭성은 작업물의 대칭축을 중심으로 일정 각도 회전 후 형상이 회전 전과 일치할 수 있는 특성을 나타내는 것입니다.
상세한 내용은 작업물의 회전 대칭성을 참조하십시오.
작업물 피킹 허용 편차
일부 작업물을 피킹할 때 로봇의 피킹 포즈가 일정한 각도 범위 내에서 유연하게 조절될 수 있으며 이 각도 범위는 피킹 허용 편차입니다.
상세한 내용은 작업물 피킹 허용 편차를 참조하십시오.