오차 분석 도구
실제 생산 과정에서는 카메라 내부 파라미터의 정확도가 낮고 로봇의 피킹이 부정확한 등의 문제가 자주 발생하는데, 이러한 문제의 원인은 길고 다양한 요인에 의해 발생할 수 있습니다.
이 부분에서는 오차 분석 도구를 사용하여 위의 문제를 해결하는 방법을 설명합니다.
도구 소개
인식 및 위치 파악 중 오류가 발생하면 이 도구를 문제 해결에 사용할 수 있습니다. 설명된 현장 상황을 기반으로 도구는 카메라 정확도 검사, 로봇 정확도 검사, 캘리브레이션 후 외부 파라미터 결과 검사를 포함하여 확인할 특정 항목을 권장합니다. 이 도구는 프로젝트 논리를 확인하거나 매칭 정확도를 분석하는 데 사용할 수 없습니다.
이 도구에 진입한 후, 다음 옵션을 완료하여 실제 생산 과정에서 발생하는 문제점을 수집하고 영향 요인을 평가할 수 있습니다.
-
EIH 시나리오에서 포인트 클라우드 모델을 만드는 동안의 이미지 캡처 위치는 피킹 오류가 발생한 경우의 이미지 캡처 위치와 동일합니까?
-
공작물 포인트 클라우드를 취득했을 때의 공작물 위치와 피킹 오차가 발생했을 때의 공작물 위치 사이의 위치 관계는 무엇입니까?
-
포인트 클라우드 품질이 좋은가요?
선택이 완료된 후 가능한 원인 분석 버튼을 클릭하면 도구에서 검사 참조를 위한 문제 해결 권장 사항 항목을 제공합니다.
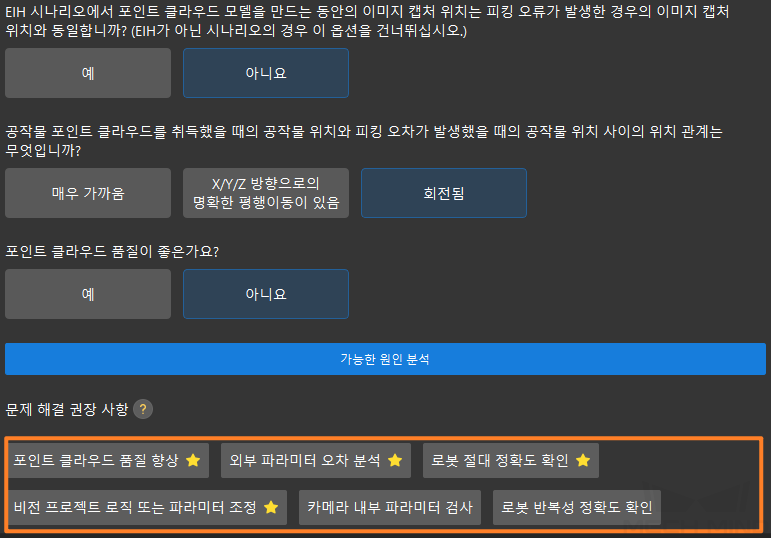
|
별표 아이콘이 있는 항목은 오차가 발생할 가능성이 높으므로 주의 깊게 확인하시기 바랍니다. |