로봇 마스터 컨트롤
소프트웨어의 메인 인터페이스에서 “툴 바” 의 “로봇 마스터 컨트롤” 버튼을 클릭하여 로봇을 연결합니다.
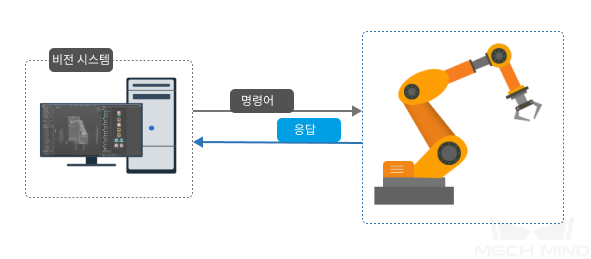
Mech-Viz와 로봇은 모니터링 프로그램을 로봇에 로드한 후 마스터/슬레이브 컨트롤 또는 통신 모델을 구성합니다. Mech-Viz는 명령어를 보내는 마스터 장치로 작동하고, 로봇은 슬레이브 장치로 작동하여 마스터 장치에서 수신한 명령어에 따라 작업을 수행합니다.
로봇 마스터 컨트롤 연결을 구축하려면 다음 단계를 수행하십시오.
-
현재 프로젝트에서 선택한 로봇 모델과 실제 로봇 모델이 동일한지 확인하십시오. 프로젝트 리소스 트리에서 로봇 모델을 확인할 수 있습니다.
-
마스터 컨트롤 프로그램을 로봇에 로드하고 통신 설정을 구성하려면 마스터 컨트롤 통신 내용을 참조하십시오(구성을 완료한 경우 이 단계를 건너뛰십시오).
-
로봇 측에서 마스터 컨트롤 프로그램을 실행합니다.
-
툴 바에 있는 로봇 마스터 컨트롤 버튼을 클릭하십시오.
-
로봇의 IP 주소를 입력하십시오.
-
로봇 연결 버튼을 클릭하십시오.
-
로봇의 마스터 컨트롤 연결이 성공했는지 확인하십시오.
현재 상태가 연결되어 있음으로 표시되면 로봇이 성공적으로 연결된 것입니다. 그런 다음 로봇을 동기화하기 버튼을 클릭하면 시뮬레이션된 로봇의 포즈가 실제 로봇의 포즈와 동기화됩니다.
로봇에 성공적으로 연결할 수 없는 경우 다음 작업에 따라 문제를 해결하십시오.
-
현재 프로젝트에서 선택한 로봇 모델과 실제 로봇 모델이 동일한지 여부를 확인하십시오.
-
입력한 로봇 IP 주소가 올바른지 확인하십시오.
-
마스터 컨트롤 프로그램이 로봇 측에 성공적으로 로드되었는지 확인하십시오.
-