TCP 통신 구성
이 부분에서는 TCP 통신을 구성하는 방법에 대해 설명합니다. 실행하기 전에 먼저 로봇을 선택하기를 확인하고 통신 구성 인터페이스로 들어가십시오.
-
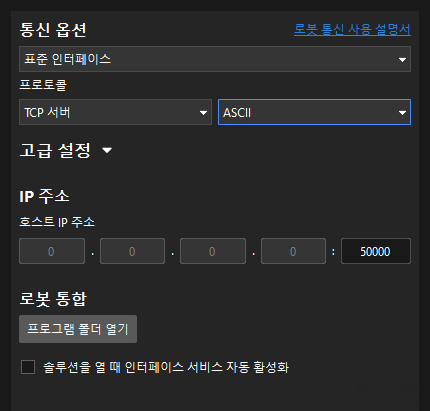
통신 옵션에서 인터페이스 서비스 유형을 표준 인터페이스로 선택하고, 프로토콜을 TCP 서버로 선택하고 아래 표에 따라 통신 프로토콜 형식을 선택합니다.
로봇 유형 통신 프로토콜 형식 ABB
HEX(리틀 엔디안)
FANUC
HEX(빅 엔디안)
KUKA
HEX(리틀 엔디안)
Yaskawa
ASCII
Kawasaki
ASCII
UR
ASCII
TM
ASCII
ELITE
ASCII
JAKA
ASCII
ROKAE
ASCII
기타
사용자는 로봇 측 통신 프로그램을 작성해야 하므로 로봇의 HEX 및 ASCII 지원에 따라 프로토콜 형식을 결정할 수 있습니다.
-
IP 주소에서 호스트 포트 번호를 입력합니다.
호스트 포트 번호는 50000 및 이상으로 설정하는 것이 좋습니다.
-
(선택 사항) 솔루션을 열 때 인터페이스 서비스 자동 활성화를 선택합니다. 다음에 솔루션을 열 때 인터페이스 서비스 시작 할 필요가 없습니다.
-
응용을 클릭합니다.
-
인터페이스 서비스 시작 합니다.
그런 다음 선택한 로봇에 따라 다음 해당 작업을 수행합니다.
-
선택한 로봇이 다음 브랜드의 로봇인 경우 아래 표의 해당 문서를 참조하여 해당 작업을 수행하십시오.
| 로봇 유형 | 관련된 문서 |
|---|---|
ABB |
ABB 표준 인터페이스 구성 |
FANUC |
FANUC 표준 인터페이스 구성 |
FANUC CRX |
CRX 플러그인 설치 및 구성 |
Kawasaki |
Kawasaki 표준 인터페이스 구성 |
KUKA |
KUKA 표준 인터페이스 구성 |
YASKAWA |
YASKAWA 표준 인터페이스 구성 |
UR |
URCap 플러그인 설치 및 구성 |
TM |
TM 표준 인터페이스 구성 |
LITE |
ELITE 표준 인터페이스 구성 |
JAKA |
JAKA 표준 인터페이스 구성 |
-
선택한 로봇이 상기 이외의 다른 브랜드 로봇인 경우 표준 인터페이스 개발자 참조 설명서를 참조하여 로봇 측 통신 프로그램을 작성하시기 바랍니다. 캘리브레이션 수행 시 해당 로봇의 마스터 컨트롤 프로그램 복제를 참고하여 자동 캘리브레이션을 완료합니다.
-
선택한 로봇이 다른 로봇인 경우 표준 인터페이스 개발자 참조 설명서를 참조하여 로봇 측 통신 프로그램을 작성합니다. 캘리브레이션을 수행할 때 관련 작업은 수동 캘리브레이션을 참조하십시오.