로봇 절대 정확도를 확인
이 부분에서는 로봇 절대 정확도 검사를 수행하는 방법을 설명합니다.
구체적인 검사 방법은 다음과 같습니다.

로봇 이동거리 오차 측정
티치 펜던트를 사용하여 작업 공간에서 고정된 방향(예: X 또는 Y 방향)을 따라 특정 거리를 이동하도록 로봇을 제어합니다. 이동 후 이론적인 거리와 로봇이 이동한 실제 거리를 비교하여 그 차이를 측정합니다.
예를 들어 티치 펜던트를 사용하여 로봇이 X 방향으로 1000mm 이동하도록 제어한 후 로봇이 실제 이동한 거리를 측정했을 때 만약 실제로 로봇이 998mm를 이동했다면 로봇 이동거리 오차는 2mm입니다.
끝단점을 중심으로 회전하여 검사
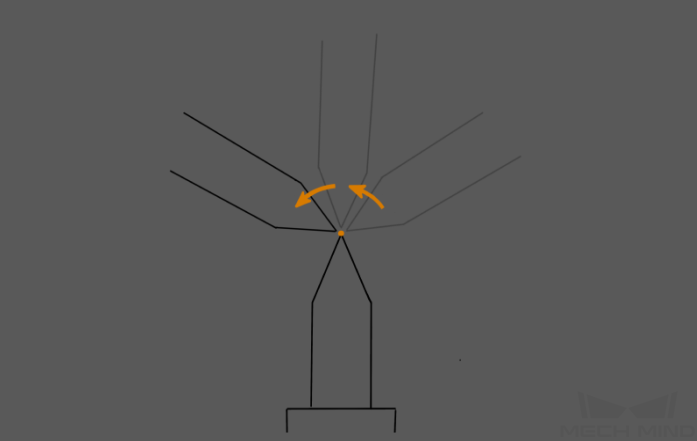
위 그림과 같이 끝단점을 중심으로 회전하는 방식은 로봇의 절대 정확도를 검사하는데 사용되며, 구체적인 설명은 다음과 같습니다.
-
로봇 플랜지 말단에 끝단점을 설치하십시오.
-
티치 펜던트의 현재 끝단점 TCP 좌표를 입력하여 로봇의 TCP로 설정합니다.
-
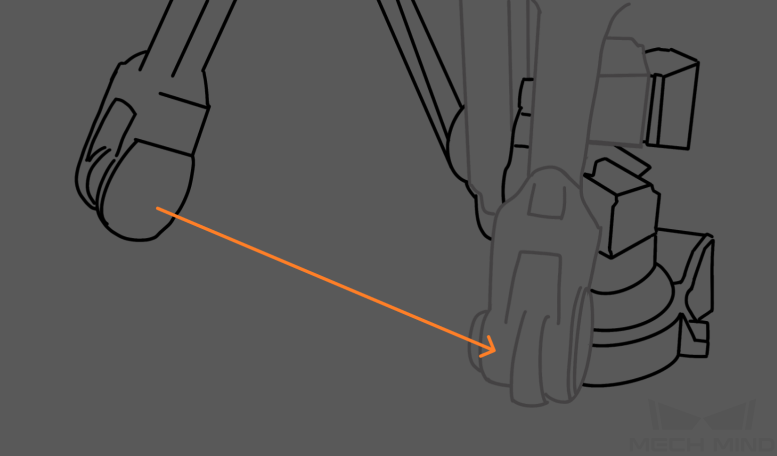
로봇 작업 공간에 또 다른 끝단점을 장착하고 고정합니다.
-
티치 펜던트를 사용하여 로봇을 이동시켜 로봇 TCP가 작업 공간의 끝단점에 정확히 닿도록 하십시오.
-
티치 펜던트를 사용하여 끝단점을 중심으로 로봇 끝을 회전시켜 두 끝단점이 여전히 접촉하고 있는지 확인하고 두 끝단점이 이탈하면 거리 변동 범위를 기록합니다.
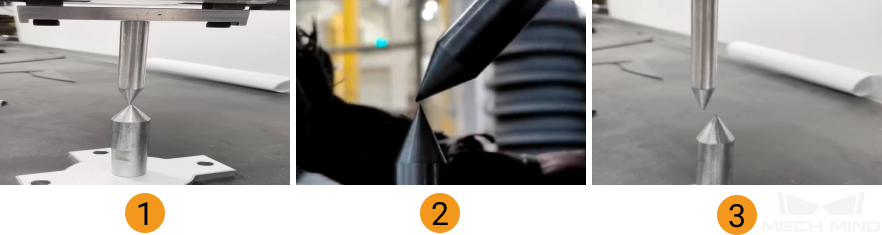
아래 그림과 같이 그림 1에서는 로봇 플랜지 말단의 끝단점이 다른 끝단점과 겹칠 수 있어 로봇의 절대 정확도가 좋다는 것을 의미하며, 그림 2에서는 로봇 플랜지 말단의 끝단점이 다른 끝단점과 닿아 로봇의 절대 정확도가 떨어지며, 그림 3에서는 로봇 플랜지 말단의 끝단점이 다른 끝단점에 닿을 때 편차가 커서 이는 로봇의 절대 정확도가 매우 낮다는 것을 나타냅니다.