EIH 외부 파라미터 오차 분석
캘리브레이션 보드 포즈를 얻기 위한 프로젝트를 구축
-
“카메라에서 이미지를 캡처하기” 스텝을 추가하기.
새 프로젝트를 만들고 “카메라에서 이미지를 캡처하기” 스텝을 추가하거나 이미 열린 프로젝트의 스텝을 선택하십시오. 그런 다음 스텝 파라미터 패널에서 카메라 선택 버튼을 클릭하여 카메라를 선택하고 연결해 테스트해야 할 외부 파라미터 그룹을 선택합니다.
-
“캘리브레이션 보드 포즈 계산 및 카메라 내부 파라미터 검사” 스텝을 추가하기.
“캘리브레이션 보드 포즈 계산 및 카메라 내부 파라미터 검사” 스텝을 추가하고 “카메라에서 이미지를 캡처하기” 스텝과 연결합니다.
-
“포즈 전환” 스텝을 추가하기.
“포즈 전환” 스텝을 추가하고 "CameraToRobot" 전환 방법을 선택합니다. “캘리브레이션 보드 포즈 계산 및 카메라 내부 파라미터 검사” 스텝을 이 스텝과 연결합니다.
겐트리 로봇을 사용하는 경우, “포즈 변환” 스텝을 “포즈 변환(겐트리)”로 바꿔야 합니다.
-
“출력” 스텝을 추가하기.
"출력" 스텝을 추가하고 포트 유형 파라미터에서 "사전 정의(비전 결과)"를 선택한 다음 "포즈 변환"의 출력 포트를 "출력" 스텝에 연결하여 계산된 캘리브레이션 보드 포즈를 출력하는 데 사용합니다.
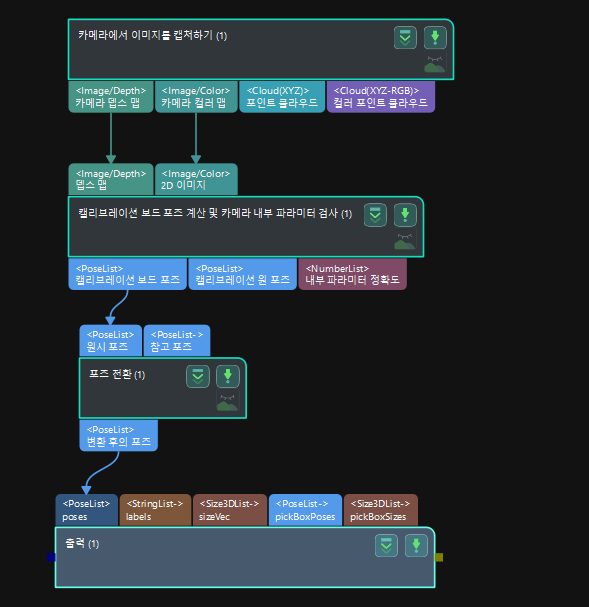
프로젝트가 구축되면 아래 그림과 같습니다.
-
프로젝트를 실행하고 결과를 확인합니다.
프로젝트를 실행하고 하단의 로그 바에서 캘리브레이션 보드 포즈의 계산 결과를 확인합니다.
EIH(Eye-in-hand)를 통해 다양한 위치에서 캘리브레이션 보드의 이미지를 캡처하기
EIH(Eye-in-hand)를 통해 작업 공간의 다양한 위치로 이동(이동에 변환과 회전을 모두 포함하는 것이 좋음)합니다. 카메라는 프로젝트가 실행된 후 이미지를 캡처한 다음 캘리브레이션 보드의 포즈 데이터를 기록하고 EIH 외부 파라미터 오차를 분석하는 데 사용합니다.