3D 포즈를 배열하기 V2
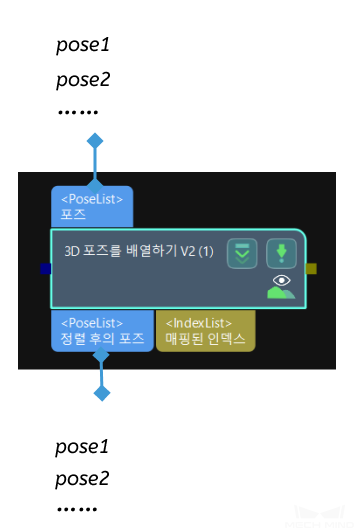
파라미터 설명
이 스텝에서는 11가지 포즈 배열 방법을 제공합니다. 자세한 설명은 다음과 같습니다.
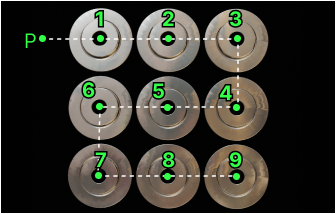
"S"자형으로 포즈 배열
기능 소개
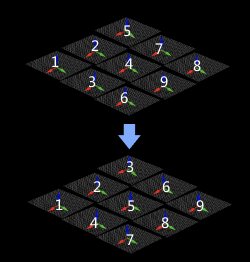
지정된 참조 포즈와 행 및 열의 방향에 따라 행과 열로 포즈를 배열("행 방향"은 포즈 배열에서 우선순위로 지정됨)합니다. 이 유형은 일반적으로 가지런히 배열된 공작물 언로딩 또는 디팔레타이징에 사용됩니다.
파라미터 설명
- 행 방향
-
설명: 이 파라미터는 "S"자형 평면 배열할 때 행의 방향을 설정하는 데 사용됩니다.
값 리스트: X축의 정방향, Y축의 정방향, Z축의 정방향, X축의 부방향, Y축의 부방향, Z축의 부방향.
기본값: X축 정방향.
- 열 방향
-
설명: 이 파라미터는 "S"자형 평면 배열할 때 열의 방향을 설정하는 데 사용됩니다.
값 리스트: X축의 정방향, Y축의 정방향, Z축의 정방향, X축의 부방향, Y축의 부방향, Z축의 부방향.
기본값: Y축 정방향.
- 행 간격
-
설명: 이 파라미터는 "S"자형 평면 배열할 때 각 행 사이의 간격을 밀리미터(mm) 단위로 설정하는 데 사용됩니다.
기본값: 100.000 mm
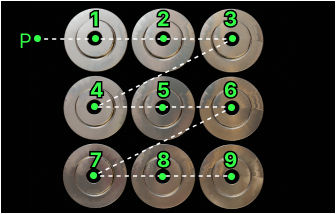
"Z"자형으로 포즈 배열
기능 소개
지정된 참조 포즈와 행 및 열의 방향에 따라 행과 열로 포즈를 배열("행 방향"은 포즈 배열에서 우선순위로 지정됨)합니다. 이 유형은 일반적으로 가지런히 배열된 공작물 언로딩 또는 디팔레타이징에 사용됩니다.
파라미터 설명
- 행 방향
-
설명: 이 파라미터는 "Z"자형으로 포즈 배열할 때 행의 방향을 설정하는 데 사용됩니다.
값 리스트: X축의 정방향, Y축의 정방향, Z축의 정방향, X축의 부방향, Y축의 부방향, Z축의 부방향.
기본값: X축 정방향.
- 열 방향
-
설명: 이 파라미터는 "Z"자형으로 포즈 배열할 때 열의 방향을 설정하는 데 사용됩니다.
값 리스트: X축의 정방향, Y축의 정방향, Z축의 정방향, X축의 부방향, Y축의 부방향, Z축의 부방향.
기본값: Y축 정방향.
- 행 간격
-
설명: 이 파라미터는 "Z"자형으로 포즈 배열할 때 각 행 사이의 간격을 밀리미터(mm) 단위로 설정하는 데 사용됩니다.
기본값: 100.000 mm