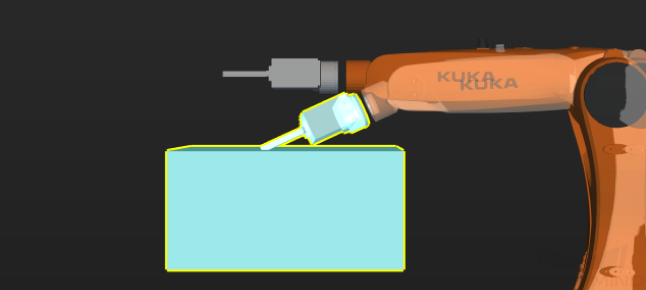
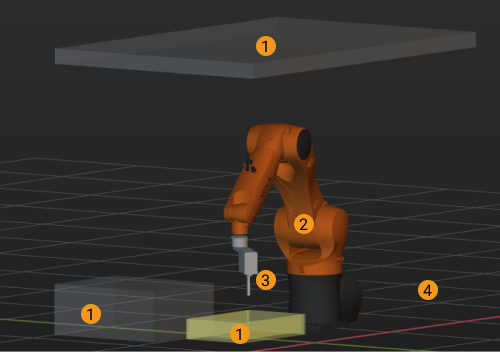
3D 시뮬레이션 공간
3D 시뮬레이션 공간에는 로봇, 시나리오 물체, 말단장치, 작업물 모델, 로봇 이동 경로, 픽 포인트 및 충돌 등을 표시하며 시나리오 물체의 모델을 드래그할 수도 있습니다.
기본 작업
인터렉티브 좌표계는 뷰의 현재 방향을 표시합니다. 각 축(X, Y, Z, -X, -Y, -Z)의 아이콘을 클릭하면 해당 축에 맞춰 뷰가 정렬됩니다. 마우스 왼쪽 버튼을 길게 누른 채 인터렉티브 좌표계를 드래그하여 뷰를 회전할 수 있습니다.

뷰 회전 |
스크롤 휠을 누른 채 원하는 방향으로 드래그하거나, 마우스 왼쪽 버튼을 누른 채 인터렉티브 좌표계를 원하는 방향으로 드래그합니다. |
뷰 평행이동 |
|
뷰 확대/축소 |
|
뷰에 맞추기 |
|
투시/직교 투영 보기 전환 |
|
누른 키보드 키 및 마우스 버튼 표시 |
|
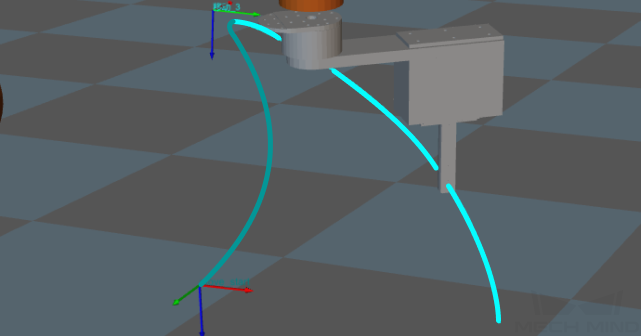
이동 경로를 표시하기
실제 로봇을 컨트롤하거나 가상 로봇의 운동 과정을 시뮬레이션하는 과정에서 로봇이 이동할 경로를 표시할 수 있습니다. 시뮬레이션 경로를 통해 로봇의 실제 이동 경로를 더 합리적으로 계획할 수 있습니다.
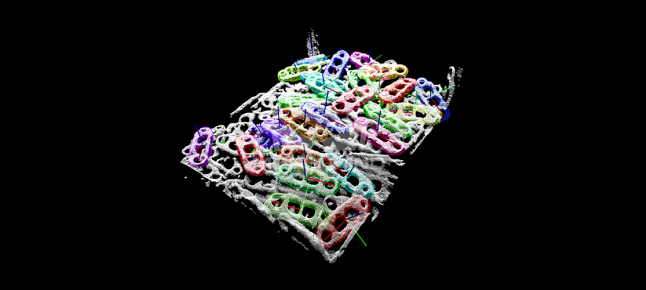
포인트 클라우드 및 픽 포인트를 표시하기
소프트웨어는 비전 서비스가 보내온 비전 결과를 3D 시뮬레이션 공간에서 표시할 것입니다. 일반적으로 완전한 비전 결과라면 다음과 같은 것을 포함해야 합니다. 작업물 포인트 클라우드, 시나리오 포인트 클라우드, 작업물 포즈, 작업물 인덱스 및 작업물 특성을 나타내는 레이블.