기본 개념
프로젝트
“프로젝트”는 Mech-Viz 소프트웨어에서 생성된 로봇 경로 계획 항목을 말합니다.
Mech-Viz에서 프로젝트에 필요한 모든 구성을 완료하면 이 프로젝트를 통해 로봇의 경로를 계획하고 로봇의 이동을 컨트롤할 수 있습니다. 프로젝트의 모든 구성 사항은 프로젝트와 이름이 동일한 폴더에 저장됩니다.
프로젝트 리소스
“프로젝트 리소스”는 로봇, 말단장치, 작업물, 시나리오 물체 등 프로젝트에 필요한 다양한 리소스를 가리킵니다.
로봇 |
Mech-Viz에 사용되는 "로봇"은 일반적으로 사용되는 다관절 산업용 로봇 또는 트러스 로봇입니다. |
말단장치 |
“말단장치”란 그리퍼, 빨판과 같이 로봇이 작업을 완료하기 위해 로봇의 플랜지에 특별히 설계되고 장착되는 장치입니다. |
작업물 |
“작업물”은 상자, 금속 부품, 접착 또는 용접할 부품 등과 같은 로봇 말단장치의 작업 대상을 가리킵니다. |
시나리오 물체 |
“시나리오 물체”는 로봇이 실제로 작업할 때 시나리오에 있는 각종 물체를 가리킵니다. 일반적으로 로봇 안전 펜스, 트레이, 파렛트, 카메라 및 카메라 스탠드 등 물체들이 포함됩니다. |
포즈
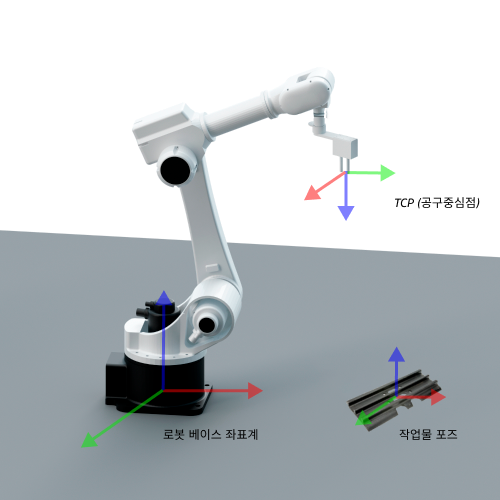
TCP(Tool Center Point, 공구중심점)
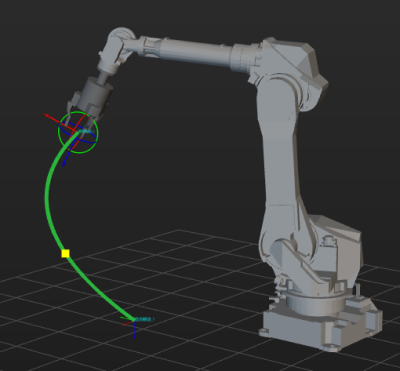
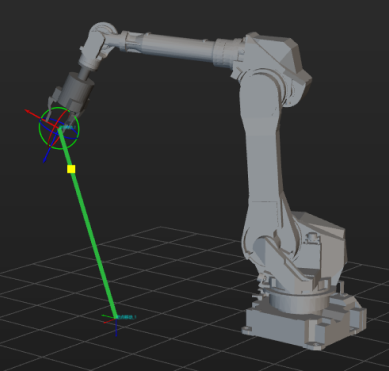
“TCP”는 로봇 말단의 플랜지를 기준으로 말단장치 위 또는외부의 특정 포인트의 포즈입니다.
작업물 피킹 등 작업을 수행하기 위해 로봇을 공간의 특정 지점으로 이동시키는 것은 본질적으로 TCP를 해당 지점으로 이동시키는 것입니다.
물체 포즈
“작업물 포즈”는 로봇 베이스 좌표계를 기준으로 작업물 위의 특정 포인트의 포즈입니다. 작업물을 배치할 때, 일반적으로 작업물 포즈를 특정 대상 포즈와 겹치게 만듭니다.
(작업물의) 픽 포인트
하나의 작업물에는 여러 가지 픽 포인트가 있을 수 있으며 픽 포인트는 Mech-Vision에서 출력됩니다. 작업물을 피킹할 때 로봇은 TCP를 픽 포인트 위치로 이동하여 두 포인트의 원점과 X축이 서로 겹치고 Y축과 Z축의 방향이 반대가 되도록 합니다.
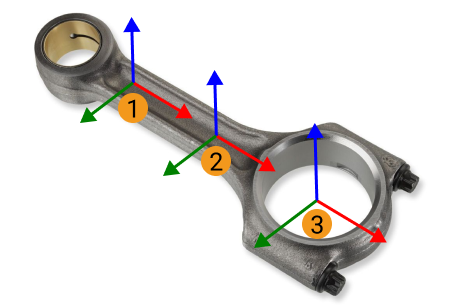
그 중 ①과 ②는 샤프트의 픽 포인트이고 ③은 링 중심의 픽 포인트입니다.
로봇 포즈
“로봇 포즈”는 3D 공간에서 로봇의 위치와 방향을 나타냅니다. 일반적으로 말단장치 포즈 또는 관절 각도로 표시됩니다.
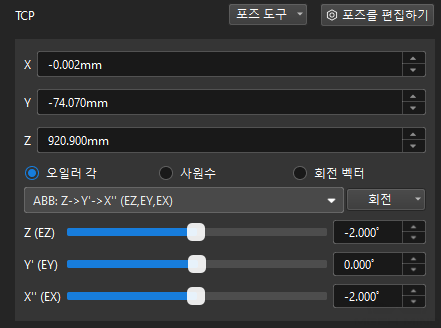
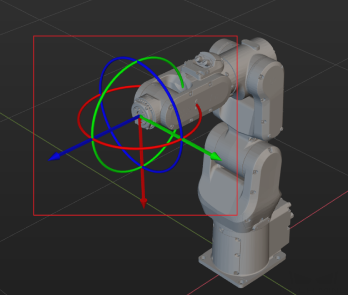
말단장치 포즈
말단장치 포즈는 로봇 베이스 좌표계를 기준으로 말단장치의 기준 좌표계의 위치를 나타냅니다.
말단장치 포즈는 말단장치의 위치(x, y, z)와 방향(일반적으로 오일러 각, 회전 행렬 및 사원수로 표시됨)을 결정합니다. 말단장치와 작업 공간 사이의 위치 관계에 초점을 맞춰 로봇이 작업을 수행할 때 로봇 클로, 용접 토치 등 공구의 위치와 방향을 설명합니다.
-
오일러 각
“오일러 각(Euler Angles)”은 3D 공간에서 물체의 회전을 설명하는 데 사용됩니다.
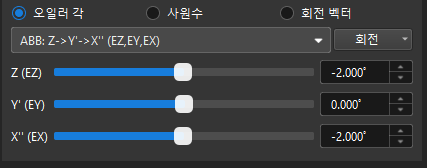
세 축 각각의 회전에 해당하는 세 가지 각도로 구성됩니다. 일반적으로 이 세 축은 각각 물체의 고정된 기준 좌표계의 X, Y, Z축을 중심으로 회전합니다. 동일한 방향은 여러 오일러 각을 사용하여 다르게 표현될 수 있습니다. 헷갈리지 않도록 하기 위해 다양한 브랜드의 로봇에는 일관된 오일러 각 정의가 적용됩니다. 예시:


-
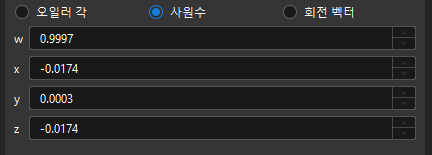
사원수
오일러 각도를 사용하는 짐벌락(gimbal lock) 문제를 피하기 위해 일부 로봇 제조업체는 사원수를 사용하여 공간의 방향을 나타냅니다. 사원수는 대략 세 개의 숫자를 사용하여 공간 회전 축을 정의하고 네 번째 숫자를 사용하여 회전 각도를 정의하는 것을 의미합니다. 말단장치의 기준 좌표계는 해당 공간 회전 축을 중심으로 일정한 각도를 회전하여 초기 상태에서 목표 포즈에 도달할 수 있습니다.
-
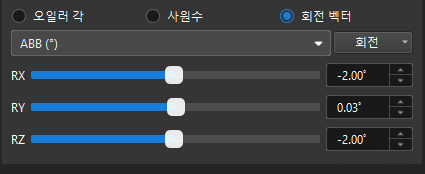
회전 벡터
축각(axial angle)라고도 알려진 회전 벡터는 말단장치의 회전 상태를 설명하는 데 사용됩니다. 현재는 UR 로봇에서만 사용됩니다.
관절 각도(JPs)
관절 각도는 초기 위치 또는 기준 위치에 대한 로봇 각 관절의 회전 각도를 나타냅니다. 이런 설명 방식은 로봇의 하드웨어 구조에 맞춰 각 관절의 상태를 나타낼 수 있습니다.
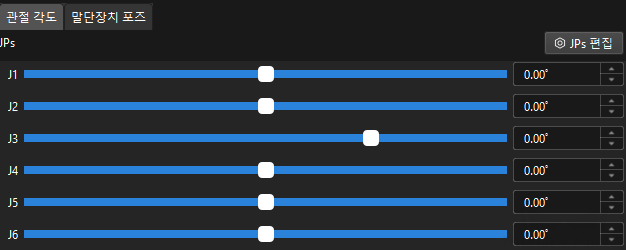
관절 각도는 순기구학(forward kinematics) 계산을 통해 말단장치 포즈에 매핑되는 반면, 말단장치 포즈는 역기구학(inverse kinematics) 계산을 통해 관절 각도에 매핑됩니다.
플랜지 포즈
플랜지 포즈는 로봇 기준 좌표계에 대한 로봇 플랜지 좌표계의 포즈이며, 그 표현 방식은 말단장치 포즈의 표현 방식과 동일합니다. TCP가 회전하지 않고 플랜지 중앙에 있는 것은 특별한 말단장치 포즈로 볼 수 있습니다.
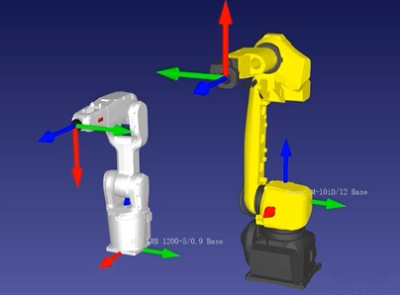
각 로봇 제조 업체에서 정의한 플랜지 기준 좌표계의 기본 방향이 다르므로 플랜지 포즈의 기본 각도도 달라집니다. 예를 들어, ABB 로봇의 기본 X축 방향은 아래쪽이고 FANUC 로봇의 기본 X축 방향은 위쪽입니다. 또한 대부분의 로봇은 플랜지 표면에 수직인 Z축이 바깥쪽을 향하는 플랜지 포즈를 가지고 있지만, 튜린로봇(Turin Robot)의 경우 플랜지 표면에 수직인 X축이 바깥쪽을 향하고 있습니다.
대칭성 및 피킹 허용 편차
말단장치 대칭성
말단장치의 대칭성은 말단장치의 대칭축을 중심으로 일정 각도 회전 후 형상이 회전 전과 일치할 수 있는 특성을 나타내는 것입니다.
상세한 설명은 말단장치 대칭성 내용을 참조하십시오.
작업물 대칭성
작업물의 대칭성은 작업물의 대칭축을 중심으로 일정 각도 회전 후 형상이 회전 전과 일치할 수 있는 특성을 나타내는 것입니다.
상세한 설명은 작업물의 회전 대칭성 내용을 참조하십시오.
작업물 피킹 허용 편차
일부 작업물을 피킹할 때 로봇의 피킹 포즈가 일정한 각도 범위 내에서 유연하게 조절될 수 있으며 이 각도 범위는 피킹 허용 편차입니다.
상세한 설명은 작업물 피킹 허용 편차 내용을 참조하십시오.