계획 기록
이 부분은 주로 계획 기록에 관한 내용입니다. 다음과 같이 몇 부분으로 나눠집니다:
소개
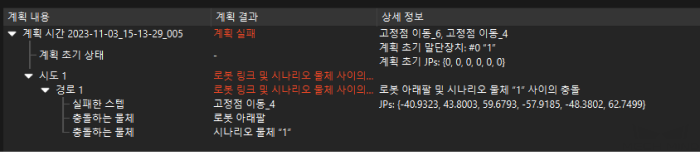
계획 기록 결과의 전체 구조는 Mech-Viz 계획의 전 과정을 상세하고 완전하게 기록하는 트리 구조입니다.
로그와 비교하면 계획 기록은 계획의 각 노드(특히 실패한 노드)를 자세히 볼 수 있습니다.
-
일부 오류는 일련의 오류로, 하나의 자식 노드 계획이 실패하면 전체 계획이 실패합니다. 예를 들어 어떤 관절 각도를 잘못 설정하면 로봇은 계획한 위치에 도달할 수 없습니다.
-
일부 오류는 일련의 오류로, 하나의 자식 노드 계획이 실패하면 전체 계획이 실패합니다. 예를 들어 Mech-Vision에서 계산&출력된 픽 포인트에 계획 결과 중 하나라도 성공하면 해당 픽 포인트를 사용하여 물체를 피킹할 수 있음을 의미합니다.
| 프로젝트를 실행하는 과정에서 실패한 노드에 중점을 둘 수 있습니다. |
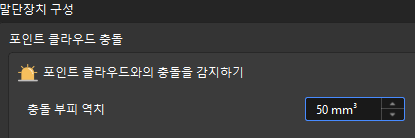
충돌 결과 시각화
일반적인 오류 및 해결 방법
다음은 몇 가지 일반적인 오류와 해당 해결 방법을 나열합니다.
웨이포인트 도달 불가

계획 결과 |
“상대적인 이동_3” 스텝에 대응한 웨이포인트는 로봇의 도달 가능한 범위를 벗어났습니다. |
해결 방법 |
로봇이 웨이포인트에 도달할 수 있도록 “상대적인 이동_3” 스텝의 웨이포인트를 조정합니다. |
로봇 싱귤래리티

계획 결과 |
"고정점 이동_6" 스텝에서 “고정점 이동_7" 스텝까지의 경로에 싱귤래리티가 있습니다. |
해결 방법 |
“고정점 이동_7" 스텝의 “웨이포인트 유형”을 “JPs”에서 “TCP”로 수정합니다. |
“운동 방식”을 “직선 운동”에서 “관절 운동”으로 수정합니다. |
|
싱귤래리티 감지 관련 파라미터를 조정합니다. |