픽 포인트를 예측하기(임의의 물체)
파라미터 조절 설명
서버
- 서버 IP
-
기본값: 127.0.0.1
설명: 실제 상황에 따라 딥 러닝 서버의 IP주소를 설정하십시오.
- 서버 포트(1 ~ 65535)
-
기본값: 60052
설명: 임의의 물체 피킹, 임의의 물체 피킹(빈 없음) 프로젝트에서 60000~65535의 포트 번호를 사용해야 합니다.
추론 설정
- 추론 모드
-
설명: 딥 러닝 추론을 선택하는 데 사용하는 모드입니다.
값 리스트: GPU, CPU
-
GPU : GPU 추론으로 모델을 최적화한 다음 최적화된 모델을 추론하면 추론 속도가 빠릅니다. 모델을 처음으로 최적화하면 10 ~ 30 분이 소요됩니다.
-
CPU: CPU를 사용하여 딥 러닝 모델 추론을 수행하며 GPU에 비해 추론 시간이 늘어나고 인식 정확도가 떨어집니다.
기본값: GPU
설명 : 추론 속도 : GPU> CPU. 추론 모드를 전환 한 후 딥 러닝 서버를 다시 시작해야 합니다.
-
작업 거리
- 최소 작업 거리
-
기본값: 0
설명: 카메라와 시나리오 물체 사이의 가장 짧은 거리(단위:mm)입니다. 빈을 사용하는 경우 이 파라미터는 카메라 바닥면에서 빈 상단 가장자리까지의 거리여야 합니다. 실제 상황에 따라 설정합니다.
- 최대 작업 거리
-
기본값: 3000
설명: 카메라와 시나리오 물체 사이의 가장 긴 거리(단위:mm)입니다. 빈을 사용하는 경우 이 파라미터는 카메라 바닥면에서 빈 하단 가장자리까지의 거리여야 합니다. 실제 상황에 따라 설정합니다.
상자 설정
- 빈을 사용하기
-
기본값: 선택하지 않음.
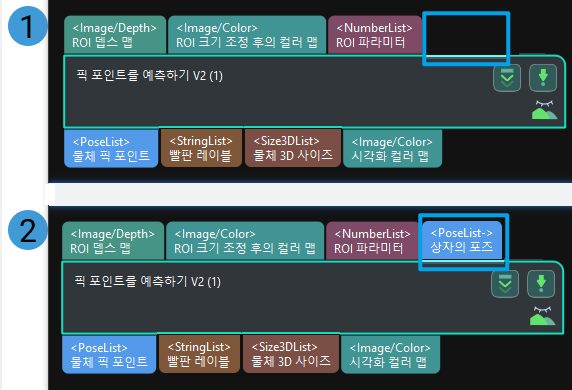
설명: 상자가 필요할 때 이 옵션을 선택합니다. 선택한 후 이 스텝에 상자의 포즈를 입력하는 포트가 증가될 것입니다. 아래 그림과 같으며 그림 1은 선택 전, 그림 2는 선택 후입니다.
- 빈의 길이
-
기본값: 100mm
설명: 빈을 사용하기를 선택한 후 상자의 사이즈에 근거하여 이 파라미터를 설정해야 합니다.
- 빈의 너비
-
기본값: 100mm
설명: 빈을 사용하기를 선택한 후 상자의 사이즈에 근거하여 이 파라미터를 설정해야 합니다.
윤곽 감지(스마트 배치, 특수 모양)
- 윤곽 감지
-
기본값: 선택하지 않음.
설명: 물체 외곽을 감지하는 데 사용됩니다. 선택한 후 하단에 특수 모양 물체 필터링 파라미터가 표시됩니다.
특수 모양 물체 필터링(택배를 피킹하는 시나리오에 많이 사용됨)
- 좁은 물체를 필터링하기
-
기본값: 선택하지 않음.
설명: 이 옵션을 선택하면 최소 외접 직사각형의 가장 긴 변의 길이가 설정한 역치보다 큰 물체는 비교적으로 긴 물체로 간주되어 필터링될 것입니다.
- 짧은 에지 길이의 하한
-
기본값: 0
설명: 좁은 물체를 필터링하기 옵션을 선택해야 이 파라미터를 볼 수 있습니다. 최소 외접 직사각형의 가장 짧은 변의 길이가 설정한 역치보다 작은 물체는 필터링될 것입니다. 실제 상황에 따라 설정합니다.
예시: 이 파라미터의 수치를 30으로 설정할 때 실제 길이가 30보다 작은 물체는 필터링될 것입니다. 아래 그림과 같이 위는 필터링 전이고 아래는 필터링 후의 효과입니다.

- 긴 물체를 필터링하기
-
기본값: 선택하지 않음.
설명: 이 옵션을 선택하면 최소 외접 직사각형의 가장 긴 변의 길이가 설정한 역치보다 큰 물체는 비교적으로 긴 물체로 간주되어 필터링될 것입니다.
- 긴 에지 길이의 상한
-
기본값: 0
설명: 긴 물체를 필터링하기 옵션을 선택해야 이 파라미터를 볼 수 있습니다. 최소 외접 직사각형의 가장 긴 변의 길이가 설정한 역치보다 큰 물체는 필터링될 것입니다. 실제 상황에 따라 설정합니다.
예시: 이 파라미터의 수치를 180으로 설정할 때 실제 길이가 180보다 큰 물체는 필터링될 것입니다. 아래 그림과 같이 위는 필터링 전이고 아래는 필터링 후의 효과입니다.

겹침 감지
- 겹침 검출
-
기본값: 선택하지 않음.
설명: 겹친 물체가 있는 경우 이 옵션을 선택하십시오. 이 옵션을 선택하면 물체가 겹친 여부를 감지하며 인식된 겹친 물체의 피킹 시의 우선 순위를 낮춥니다.
- 최대 수량
-
기본값: 6
설명: 겹침 검출 버튼을 클릭한 후 이 옵션이 나타납니다. 이는 겹치는 물체로 간주되는 최대 물체 수를 정의합니다. 실제 상황에 따라 설정합니다. 이 값이 높을수록 더 많은 물체가 겹치는 것으로 간주되므로 피킹 작업을 완료하기가 더 어려워집니다. 그러나 대상 물체가 손상될 가능성은 적습니다.
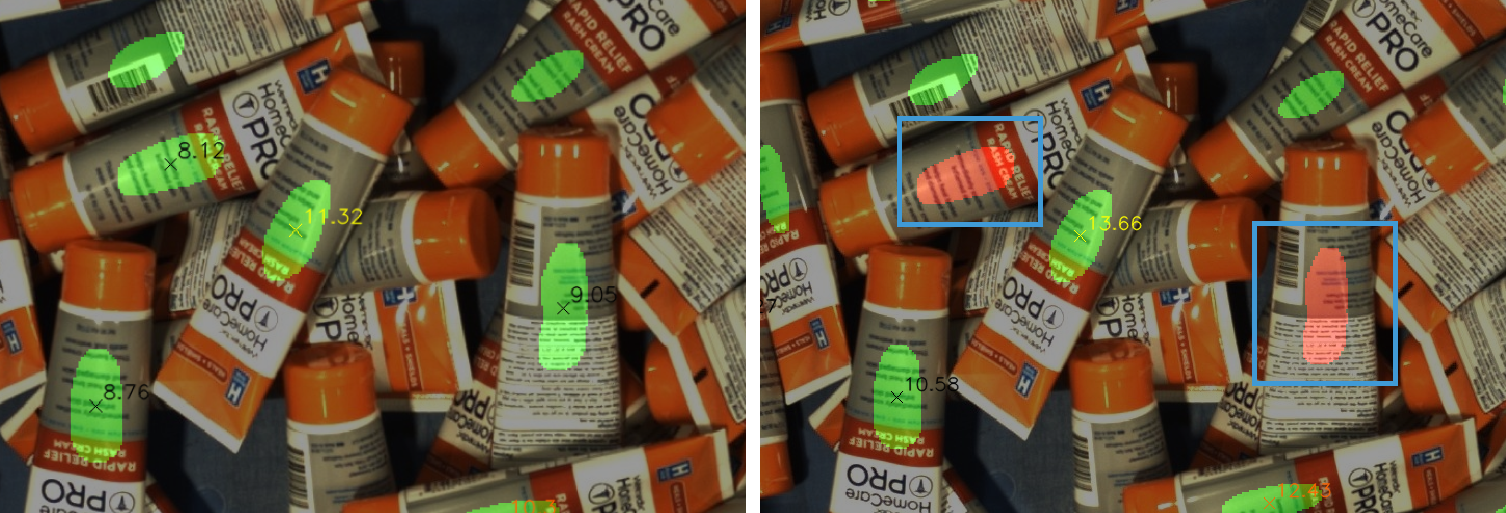
설명: 이 값을 6으로 설정하면 아래와 같이 6개 이하의 겹치는 물체가 감지됩니다. 아래 그림과 같이 왼쪽은 겹침 검출 전의 효과이고 오른쪽은 이 파라미터의 수치를 6으로 설정할 때의 검출 결과이며 빨간색 구역을 가진 물체는 검출된 겹친 물체입니다.
진공 그리퍼 설정
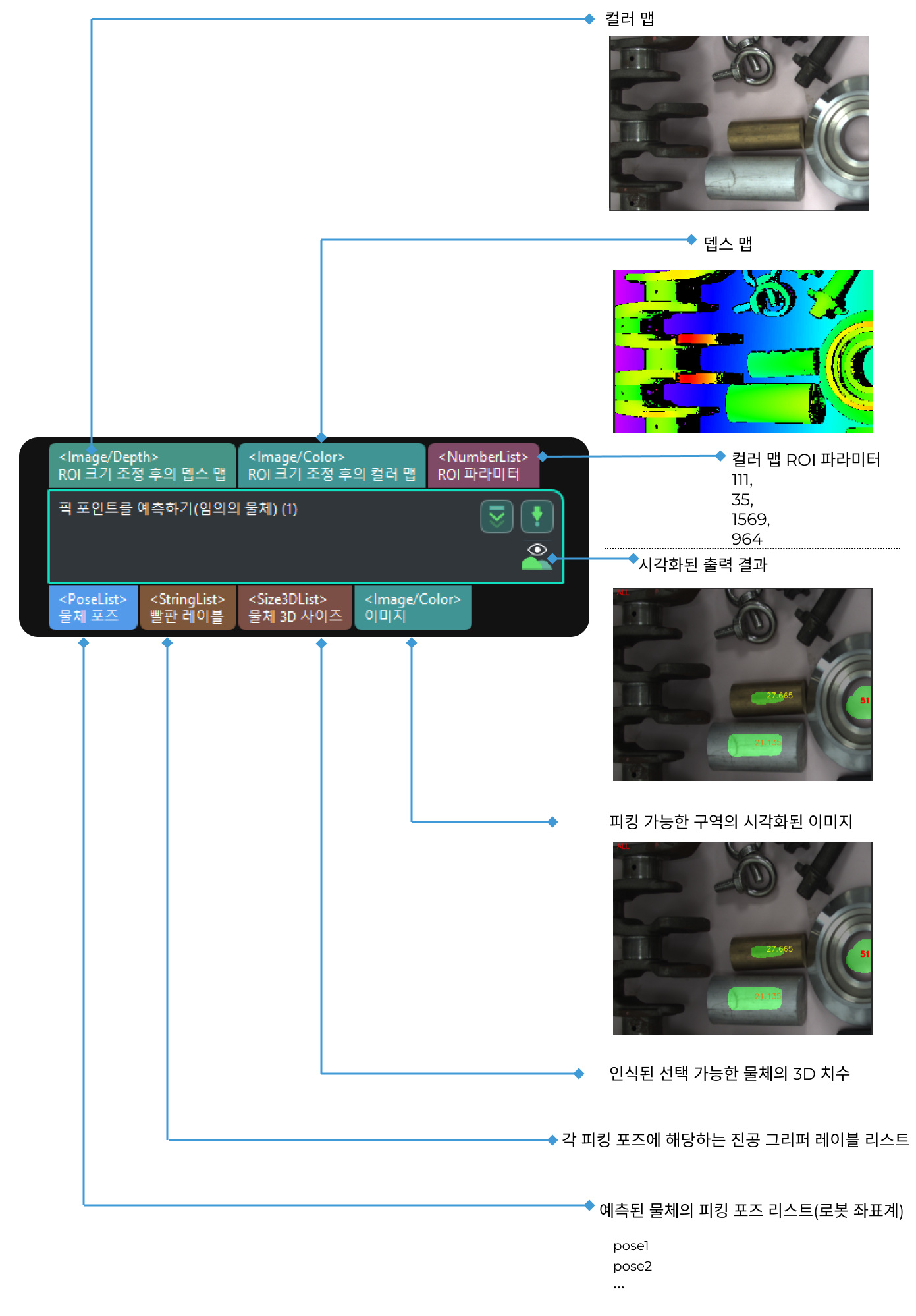
이 파라미터를 조절함으로써 \"픽 포인트를 예측하기\" 스텝의 진공 그리퍼 레이블 출력 결과를 결정합니다.

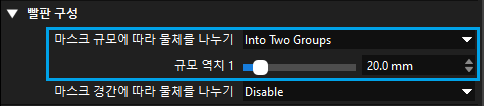
- 마스크 규모에 따라 물체를 나누기
-
기본값: Disable
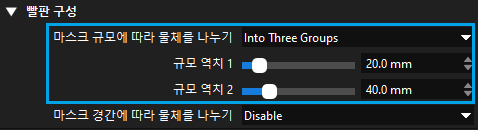
값 리스트: Disable, Into Two Groups, and Into Three Groups
설명: 마스크의 최소 내접원 반경의 차이에 따라 물체들은 서로 다른 그룹에 할당되며 각 그룹의 물체는 다른 진공 그리퍼 설정을 사용합니다.
- 규모 역치 1
-
기본값: 0
설명: 마스크의 최소 내접원의 첫번째 역치입니다. 반경이 이 역치보가 작은 물체는 그룹1에 나뉘며 이 역치보다 큰 물체는 그룹2에 나뉩니다.
설명: 아래 그림과 같이 물체 마스크 내의 내접원 반경이 20mm보다 작으면 진공 그리퍼 레이블을 Small로 판단합니다.
- 규모 역치 2
-
기본값: 0
설명: 마스크의 최소 내접원의 두번째 역치입니다. 반경이 이 역치보가 작은 물체는 그룹2에 나뉘며 이 역치보다 큰 물체는 그룹3에 나뉩니다.
설명: 아래 그림과 같이 물체 마스크 내의 내접원 반경이 40mm보다 크면 진공 그리퍼 레이블을 Large로 판단하며 물체 마스크 내의 내접원 반경이 20~40mm범위 내 있으면 진공 그리퍼 레이블을 Middle로 판단합니다.
- 마스크 경간에 따라 물체를 나누기
-
기본값: Disable
값 리스트: Disable and Into Two Groups
설명: 마스크의 최소 내접원 반경의 차이에 따라 물체들은 서로 다른 그룹으로 나뉘며 각 그룹의 물체는 다른 진공 그리퍼 설정을 사용합니다.
- 경간 역치
-
기본값: 80
설명: 물체 마스크의 최소 외접 직사각형의 대각선 길이가 이 역치보다 작으면 \"Short\"로 표시되고 역치보다 크면 \"Long\"으로 표시됩니다.
설명: 아래 그림과 같이 물체 마스크의 길이가 80mm보다 크면 진공 그리퍼 레이블을 긴 것으로 판단하고 작으면 짧은 것으로 판단합니다.

시각화
- 시각화 시작
-
기본값: 선택함.
설명: 이 옵션을 선택하면 시각화를 시작할 수 있으며 선택한 시각화 속성 효과를 볼 수 있습니다.
- 시각화 유형
-
기본값: Final Score
값 리스트: 최종 점수, 진공 그리퍼 직경, 물체 길이, 포즈 높이
설명: 시각화할 항목을 선택합니다.
조절 예시:
-
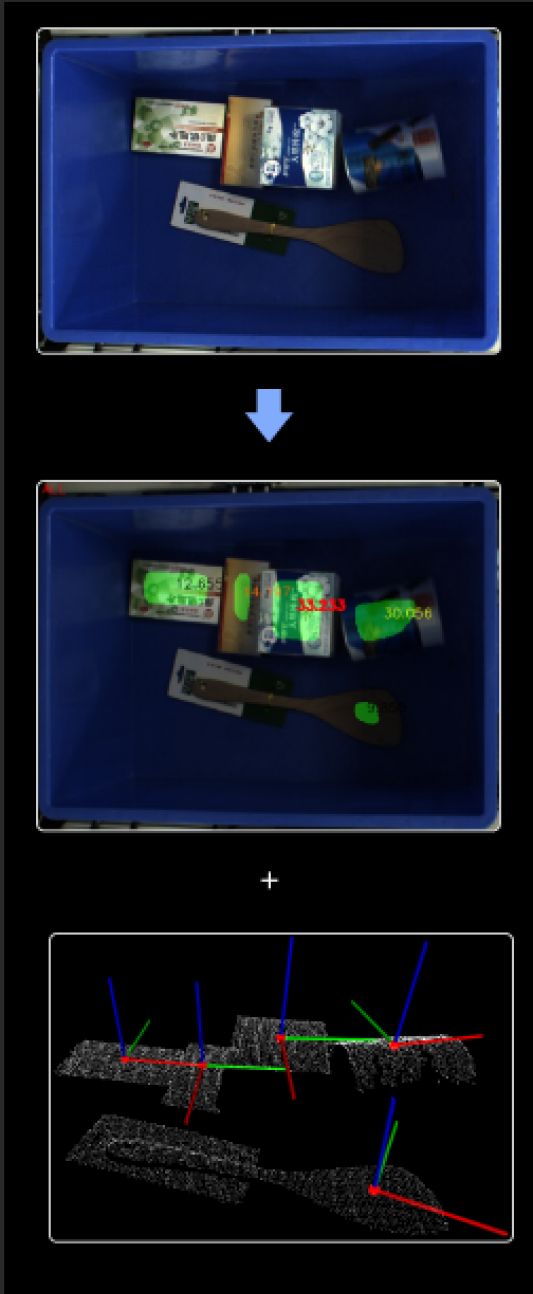
시각화 유형에서 최종 점수를 선택하면 시각화 출력 효과가 아래 그림과 같습니다. 그중에 빨간색 글꼴의 물체는 우선으로 피킹하는 대상입니다.

-
시각화 유형에서 진공 그리퍼 직경을 선택하면 시각화 출력 효과가 아래 그림과 같습니다. 그중에 빨간색 글꼴의 물체는 우선으로 피킹하는 대상입니다.

-
시각화 유형에서 물체 길이를 선택하면 시각화 출력 효과가 아래 그림과 같습니다. 그중에 빨간색 글꼴의 물체는 우선으로 피킹하는 대상입니다.

-
시각화 유형에서 포즈 높이를 선택하면 시각화 출력 효과가 아래 그림과 같습니다. 그중에 빨간색 글꼴의 물체는 우선으로 피킹하는 대상입니다.

-
포즈 정렬 논리
- 포즈 높이의 가중치
-
기본값: 3
값 리스트: 1, 2, 3
- 진공 그리퍼 사이즈 가중치
-
기본값: 1
값 리스트: 0, 1, 2, 3
- 물체 길이의 가중치
-
기본값: 1
값 리스트: 0, 1, 2, 3
설명: 포즈의 높이, 진공 그리퍼의 사이즈, 물체의 길이에 대해 피킹 시의 가중치를 설정한 후 항목의 점수는 항목에 해당 가중치 값을 곱한 값이며 점수의 합은 최종 점수이며 로봇은 최종 점수에 따라 가장 높은 점수를 가진 물체를 피킹합니다.