ETH 외부 파라미터 오차 분석
캘리브레이션 보드 포즈를 얻기 위한 프로젝트를 구축
-
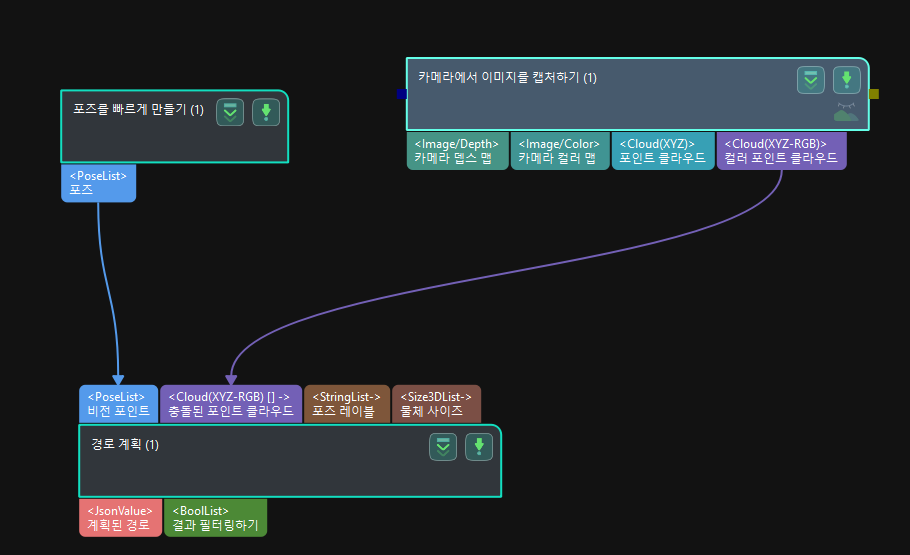
“카메라에서 이미지를 캡처하기” 스텝을 추가하기.
새 프로젝트를 만들고 “카메라에서 이미지를 캡처하기” 스텝을 추가하거나 이미 열린 프로젝트의 스텝을 선택하십시오. 그런 다음 스텝 파라미터 패널에서 카메라 선택 버튼을 클릭하여 카메라를 선택하고 연결해 테스트해야 할 외부 파라미터 그룹을 선택합니다.
-
“경로 계획” 스텝을 추가하기.
“경로 계획” 스텝을 추가하고 “카메라에서 이미지를 캡처하기” 스텝의 컬러 포인트 클라우드 출력 포트를 충돌 포인트 클라우드 포트에 연결합니다.
-
"포즈를 빠르게 만들기" 스텝을 추가하기.
"포즈를 빠르게 만들기" 스텝을 추가하고 포즈 출력 포트를 "경로 계획" 스텝의 비전 포인트 입력 포트에 연결합니다.
프로젝트가 구축되면 아래 그림과 같습니다.
-
시뮬레이션 인터페이스로 들어가기.
"경로 계획" 스텝에서 편집기 열기를 클릭하여 3D 시뮬레이션 공간으로 들어갑니다.
로봇 포즈를 동기화하고 캘리브레이션 보드 포인트 클라우드를 포함한 시나리오 포인트 클라우드를 얻기
-
"경로 계획" 스텝에서 편집기 열기를 클릭하여 3D 시뮬레이션 공간으로 들어갑니다.
-
실제 로봇의 포즈를 "경로 계획" 도구에 동기화하여 시뮬레이션 인터페이스의 로봇 포즈가 실제 로봇의 포즈와 동일한지 확인합니다.
-
시뮬레이션 버튼을 클릭하여 캘리브레이션 보드가 포함된 시나리오 포인트 클라우드를 시각화합니다(시뮬레이션을 클릭한 후 관련 오류 메시지는 무시될 수 있음).
캘리브레이션 보드에 가상 TCP 생성
-
“경로 계획 도구”의 리소스에 종료 도구를 추가합니다.
-
3D 시뮬레이션 영역에서 말단 장치의 시각화를 확인하고 TCP가 캘리브레이션 보드의 원 중심과 일치하도록 파라미터를 조정합니다(포즈 축은 원의 십자와 일치해야 하며 XOY 평면은 캘리브레이션 보드 평면과 밀접하게 정렬됨).
-
도구 이름을 입력하고 확인을 클릭하면 가상 TCP 생성이 완료됩니다.
작업 공간의 다른 위치에서 외부 파라미터 평가
-
티치 펜던트를 사용하여 실제 로봇을 작업 공간의 다른 위치로 이동합니다.
-
실제 로봇의 포즈를 "경로 계획" 도구에 동기화하여 시뮬레이션 인터페이스의 로봇 포즈가 실제 로봇의 포즈와 동일한지 확인합니다.
-
"시뮬레이션" 버튼을 클릭하여 캘리브레이션 보드가 포함된 새로운 시나리오 포인트 클라우드를 얻습니다.
-
이전에 추가한 가상 TCP가 캘리브레이션 보드의 원 중심과 일치하는지 확인합니다.