작업물의 회전 대칭성
이 부분에서는 작업물의 회전 대칭성에 대해 소개하겠습니다.
소개
| 이 부분에서 말하는 "대칭성"은 모두 "회전 대칭성"을 가리킵니다. |
작업물의 대칭성은 작업물의 대칭축을 중심으로 일정 각도 회전 후 형상이 회전 전과 일치할 수 있는 특성을 나타내는 것입니다. 작업물이 대칭성을 가진 경우 사용자는 특정 요구에 따라 작업물 구성에서 작업물의 대칭성과 관련된 파라미터를 설정할 수 있습니다. 작업물의 대칭성을 구성하면 피킹 및 배치 프로세스 중에 로봇의 말단 회전을 줄이고 계획 성공률을 높이고 계획 시간을 단축하고 로봇을 보다 원활하고 빠르게 움직일 수 있습니다.
작업물 대칭 유형
회전 대칭축을 결정하기
회전 대칭축은 매칭 모델 및 픽 포인트 편집기에서 설정한 기하학적 중심점이 위치하는 축입니다. 회전 대칭축은 유일하지 않습니다. 작업물이 배치되는 방식, 말단장치 유형등 요소로 인해 Mech-Vision에서 동일한 작업물 기하학적 중심점의 설정 방식이 다양할 수 있으며 회전 대칭축의 결정에 영향을 미칠 수 있습니다.
일반적인 배치 방식에서 일부 일반적인 작업물의 대칭 유형은 다음과 같습니다. 사용하는 작업물의 회전 대칭축을 모르면 매칭 모델 및 픽 포인트 편집기에서 기하학적 중심점의 설정을 참조하십시오.

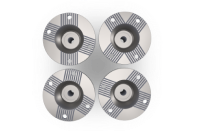


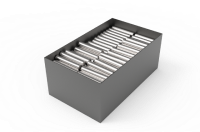



대칭 횟수
하나의 작업물이 대칭축을 중심으로 하여 일정한 각도(a°)로 회전했을 때 회전 전의 모양과 완벽하게 겹칠 수 있습니다. 대칭 횟수 N= 360°/a°.
일반적으로 직육면체 종이 상자의 대칭 횟수 N=2, 삼각기둥의 대칭 횟수 N=3, 원기둥의 대칭 횟수 N=양의 무한대 ∞ (소프트웨어에 있는 "원형 대칭"에 해당함)입니다.
 |
 |
 |
 |
|---|---|---|---|
N = 2 |
N = 4 |
N = 9 |
원형 대칭 |
시도 범위
아래 그림과 같이 B,C 사이의 각도 범위는 바로 시도 범위입니다.

시도 범위는 작업물의 배치 방식, 빈의 모양 및 프로젝트 사이클 타임 등 요소에 따라 설정해야 합니다. 시도 범위를 매우 크게 설정하면 계획 속도를 낯출 수 있으며 매우 작게 설정하면 도달 가능한 픽 포인트를 놓칠 수 있습니다.