기타
이 기능 패널에는 “실행 설정”, “스텝 수집 설정”, “싱귤래리티 감지” 및 “전역 JPs 제한 조건”이 포함되어 있습니다.
실행 설정
-
비슷한 웨이포인트를 건너뛰기
두 웨이포인트가 매우 비슷하면(위치가 매우 가까우면) 이전 웨이포인트만 로봇에 전송합니다.
-
기본적인 작업물 구성만 사용하기
이 옵션을 선택하면 물체의 레이블을 수신해도 작업물 구성의 기본값을 사용합니다.
-
로봇 서비스 제한시간
이동 스텝 및 "제어권 이전" 스텝을 제외하고 Mech-Viz와 로봇 사이의 통신할 때의 제한 시간입니다. 기본값은 1000ms.
싱귤래리티 감지
싱귤래리티 감지의 목적
로봇이 싱귤래리티에 도달하면 특정 직선 운동(Move L) 동작 명령어를 실행할 수 없어 로봇의 경보 알람이 트리거되며 생산이 중단될 수 있습니다. 싱귤래리티 감지 기능은 조기 경고를 제공하고 경로 계획 프로세스에서 싱귤래리티를 방지하여 보다 원활한 로봇 동작을 보장하고 시스템 알람 및 이상 현상의 발생을 줄여 생산 연속성을 유지하는 데 도움이 됩니다.
싱귤래리티 감지 방식
Mech-Viz 소프트웨어는 기타 기능 패널의 싱귤래리티 감지 화면에서 “최대 속도”, “감속비”, “관절 각도 범위”를 설정함으로써 싱귤래리티를 감지할 수 있습니다. 싱귤래리티 감지 방식에는 네 가지 옵션이 있습니다.
-
감지하지 않기
-
각 관절의 속도를 감지하기
-
특정 관절의 각도를 감지하기
-
각 관절의 속도와 특정 관절의 각도를 감지하기
| 싱귤래리티 감지는 “운동 방식”이 직선 운동으로 설정된 이동 유형 스텝에만 적용됩니다. |
각 관절의 속도를 감지하기
-
설명
로봇의 어떤 관절 속도가 지정된 최대 속도의 설정값을 초과하는 것이 감지되면 Mech-Viz는 이동 유형 스텝에 설정된 속도가 감속비에 따라 감소되고 싱귤래리티 감지가 다시 수행됩니다. 감소된 속도가 최대 속도의 설정값보다 작으면, 로봇은 해당 스텝을 수행할 때 감소된 속도로 이동합니다. 감소된 속도가 여전히 최대 속도의 설정값보다 크면, 소프트웨어는 로봇이 움직일 때 싱귤래리티 문제가 발생하여 로봇이 원하는 위치에 도달할 수 없다고 판단합니다.
감소된 속도 = 원본 속도 × 감속비 -
설정 방법
-
감지 방식의 드롭다운 바에서 각 관절의 속도를 감지하기를 선택합니다.
-
최대 속도와 감속비 파라미터를 설정합니다.
-
특정 관절의 각도를 감지하기
-
설명
로봇이 직선 운동으로 이동할 때 Mech-Viz는 지정된 관절의 각도가 각도 하한 및 각도 상한으로 지정된 설정 범위 내에 있는지 여부를 감지합니다. 관절 각도가 설정된 범위 내에 있으면 소프트웨어는 로봇이 이동할 때 싱귤래리티 문제가 발생하여 로봇이 원하는 위치에 도달할 수 없다고 판단합니다.
-
설정 방법
-
감지 방식의 드롭다운 바에서 특정 관절의 각도를 감지하기를 선택합니다.
-
관절을 선택하기에서 원하는 관절 각도를 선택합니다.
-
각도 상한 및 각도 하한 파라미터를 설정합니다.
-
각 관절의 속도와 특정 관절의 각도를 감지하기
-
설명
Mech-Viz는 직선 운동을 통해 각 관절의 속도가 설정된 “최대 속도”를 초과하는지 여부와 지정된 관절의 각도가 설정된 각도 범위 내에 속하는지 동시에 감지합니다. 위의 “특정 관절의 각도를 감지하기”와 “각 관절의 속도를 감지하기”에 대한 설명을 참조하시기 바랍니다.
로봇이 위 두 가지 옵션의 요구 사항을 하나도 충족하지 못하는 경우, 소프트웨어는 로봇이 이동할 때 싱귤래리티 문제가 발생하여 로봇이 원하는 위치에 도달할 수 없다고 판단합니다.
-
설정 방법
-
감지 방식의 드롭다운 바에서 각 관절의 속도와 특정 관절의 각도를 감지하기를 선택합니다.
-
위의 “특정 관절의 각도를 감지하기”와 “각 관절의 속도를 감지하기”에 대한 설명을 참조하여 최대 속도, 감속비, 관절을 선택하기, 각도 상한, 각도 하한 파라미터를 설정합니다.
-
전역 JPs 제한
|
이동 스텝의 파라미터에 있는 "관절 각도 제한 조건"을 "Auto"으로 설정하면 Mech-Viz는 이 설정 사항대로 실행하고 그렇지 않으면 이동 스텝의 "관절 각도 제한 조건"을 사용하여 실행합니다. |
-
어깨/팔꿈치/손목을 뒤척이지 않기
작업물을 잡고 있을 때 또는 실행 과정 전반 상태에서 불필요한 로봇의 뒤척임을 줄입니다.
어깨/팔꿈치/손목을 모두 "뒤척이지 않기"로 설정하는 것은 반드시 좋은 것이 아닙니다. 예를 들어:
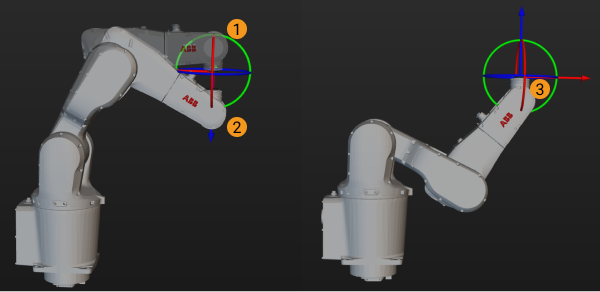
로봇이 1에서 2로 이동하는 경우, "손목을 뒤척이지 않기"로 설정하면 로봇의 뒤척임이 오히려 더 커질 수 있고 로봇은 결국은 3의 상태가 될 수 있으므로 이런 경우에 "어깨를 뒤척이지 않기" 및 "팔꿈치를 뒤척이지 않기"만 설정하면 됩니다.