로봇 DH 파라미터 검사
로봇과 비전 시스템이 관절 각도를 통해 포즈 데이터를 전송하는 경우, 로봇의 DH 파라미터의 정확성이 로봇의 정확도에 영향을 미칠 수 있습니다. 이 부분에서는 로봇의 DH 파라미터를 검사하는 방법에 대해 설명합니다.
DH 파라미터 소개
로봇 DH 파라미터는 로봇 관절과 커넥팅 로드 특징을 설명하는 데 사용됩니다. 이 파라미터는 로봇의 기하학 및 동력학 특성을 이해하여 로봇 모션을 더 잘 제어하는 데 도움이 됩니다.
DH 파라미터를 통해 로봇의 모양과 치수를 알 수 있으며 다양한 관절 각도에 따른 로봇의 위치와 포즈를 확인할 수 있습니다.
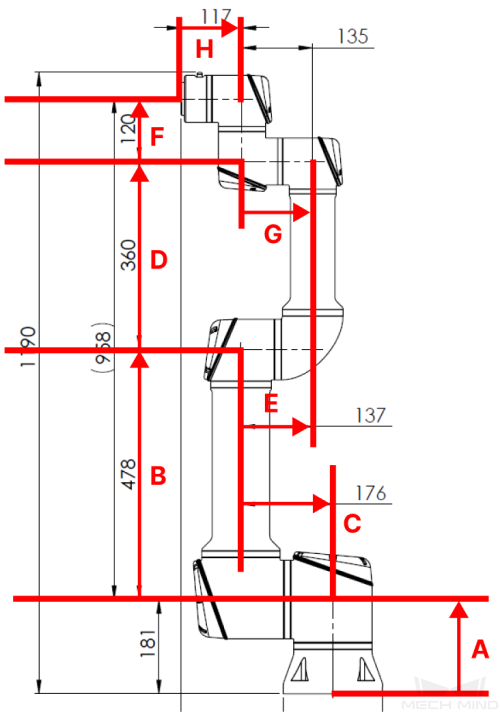
6축 협업 로봇(UR5와 비슷함)을 예로 들면 DH 파라미터는 다음 그림과 같습니다.
DH 파라미터 사용 시나리오
아래와 같이 일부 피킹 시나리오에서는 로봇 DH 파라미터가 사용됩니다.
-
일부 로봇의 핸드-아이 캘리브레이션(마스터 컨트롤 통신)
-
로봇 관절 각도 정보만 수신하는 EIH 시나리오
-
로봇에 웨이포인트 관절 각도 정보를 전송하는 시나리오
DH 파라미터 검사
로봇과 비전 시스템이 관절 각도를 통해 포즈 데이터를 전송하는 경우, 실제 로봇의 DH 파라미터가 가상 로봇의 DH 파라미터와 일치하지 않으면 로봇의 정확도 오차가 발생할 수 있으며 이런 경우에는 로봇 DH 파라미터를 검사해야 합니다. 검사 스텝은 다음과 같습니다.
-
로봇 작업 안내서를 참조하여 실제 로봇의 DH 파라미터를 확인합니다.
-
로봇 모델 라이브러리를 참조하여 가상 로봇의 DH 파라미터를 확인합니다.
-
실제 로봇과 가상 로봇의 DH 파라미터를 비교합니다. DH 파라미터가 일치하지 않는 경우 [robot]_algo.json 파일을 수정해야 합니다.
구체적인 작업은 로봇 모델 파라미터 검증 가이드 내용을 참조해 주십시오.