■ 현재 사용하고 있는 제품의 버전이 확실하지 않은 경우에는 언제든지 당사 기술 지원팀에 문의하시기 바랍니다.
기능 설명
길표지를 설정하기 스텝은 길표지 분기 스텝과 함께 사용해야 합니다. 작업 흐름에서 태그를 설정한 후 후속 작업 흐름에서 태그에 따라 다른 분기를 수행할 수 있습니다.
“길표지를 설정하기” 및 “길표지 분기” 스텝에 대한 이해를 돕기 위해 관련 예제 프로그램이 제공됩니다. 소프트웨어에서 “파일” > “새로 만들기” > “샘플 프로젝트” > “기타” > “길표지 분기”를 클릭하여 샘플 프로젝트를 열 수 있습니다.
파라미터 설명
“길표지 분기”의 아웃 포트
현재 작업 흐름 속의 태그 수입니다. 이 파라미터는 "길표지 분기" 스텝의 아웃 포트 수량 파라미터를 참조하여 설정해야 합니다.
“길표지를 설정하기” 스텝의 번호는 “아웃 포트 수량 ”의 값과 동일해야 합니다. 예를 들어, 두 개의 "길표지를 설정하기" 스텝을 사용하는 경우, "아웃 포트 수량"을 2로 설정해야 합니다. 분기 태그 1은 "길표지 분기" 스텝의 아웃 포트 0에 해당하고, 분기 태그 2는 "길표지 분기" 스텝의 아웃 포트 1에 해당합니다.
응용 예시
예시 1
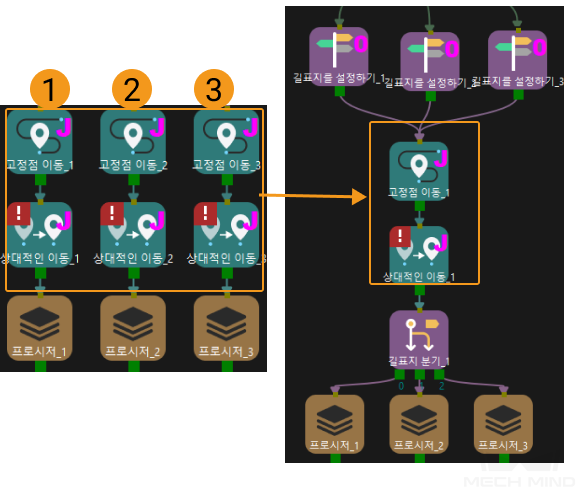
아래 예시 그림에서:
세 가지 분기(①, ②, ③)에는 동일한 파라미터 설정을 가진 동일한 스텝(고정점 이동, 상대적인 이동)이 있습니다. 따라서 "길표지를 설정하기" 스텝을 사용하여 세 가지 분기 각각에 개별적으로 태그를 지정할 수 있습니다. 그런 다음 “고정점 이동”과 “상대적인 이동” 중 한 세트를 사용한 후 "길표지 분기" 스텝을 사용하여 다른 분기 프로세스로 돌아갈 수 있습니다.
예시 2
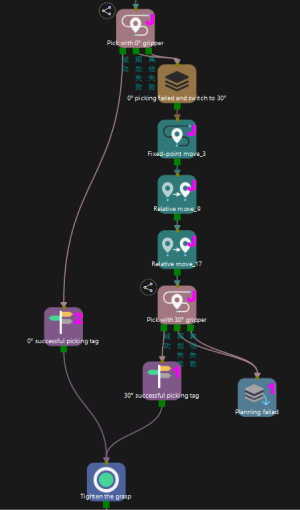
“길표지 분기” 샘플 프로젝트에는 로봇은 서로 다른 각도에서 두 개의 말단장치를 사용하여 작업물을 피킹하려고 시도합니다. 작업물을 배치할 때 각도를 0°로 다시 전환해야 합니다.
피킹 과정에서 30°의 말단장치를 사용하여 작업물을 피킹하는 작업 흐름을 1로 표기하고 0°의 말단장치를 사용하여 작업물을 피킹하는 작업 흐름을 2로 표기합니다.
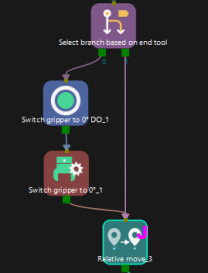
배치 과정에서 "길표지 분기" 스텝에서는 이전 작업 흐름의 태그를 기반으로 말단장치의 포즈를 조정해야 하는지(즉, 말단장치를 30°에서 0°로 다시 전환해야 하는지 여부) 결정합니다.