겐트리 로봇 캘리브레이션 설명
관련 개념
겐트리 로봇
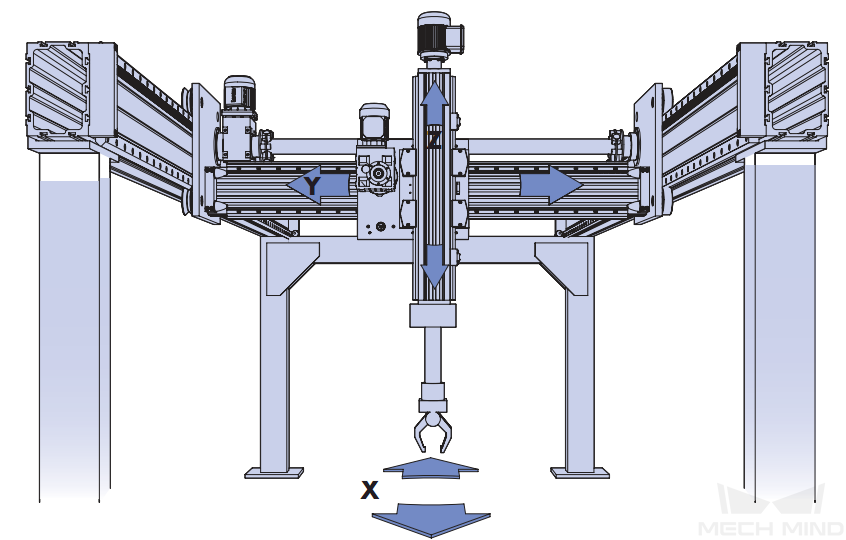
겐트리 로봇은 자동 제어를 실현할 수 있는 자동화 장치이며 공간의 XYZ 데카르트 좌표계를 기반으로 재프로그래밍이 가능하고 여러 자유도를 가지며 다양한 작업에 적합합니다.
겐트리 로봇의 자유도
겐트리 로봇은 다자유도 운동을 지원하며 각 자유도 사이의 공간 각도는 직각입니다.
겐트리 로봇은 일반적으로 2~6개 자유도를 지원합니다. 예를 들면 다음과 같습니다.
-
XYZ 축은 선형으로 이동할 수 있습니다(3자유도).
-
XYZ 축은 선형으로 이동할 수 있고 Z 축(Rz 또는 C 축이라고 함)은 회전(4개 자유도)할 수 있습니다.
-
XZ 축은 선형으로 이동할 수 있습니다(2개 자유도).
-
XZ 축은 선형으로 이동할 수 있고 Z 축은 회전할 수 있습니다(3개 자유도).
카메라는 일반적으로 겐트리의 특정 축(예: Z 또는 C 축)에 장착되며 카메라의 사진 캡처 위치는 축의 움직임에 영향을 받습니다. 따라서 캘리브레이션 사전 구성에서 어느 축의 이동이 카메라의 위치에 영향을 주는지를 지정해야 합니다.
왼손/오른손 좌표계
Mech-Mind 비전 시스템은 오른손 좌표계에서 로봇의 플랜지 포즈를 사용하여 외부 파라미터를 계산합니다. 따라서 겐트리 로봇을 사용할 때는 겐트리 좌표계가 오른손 좌표계인지 여부를 판단해야 합니다.
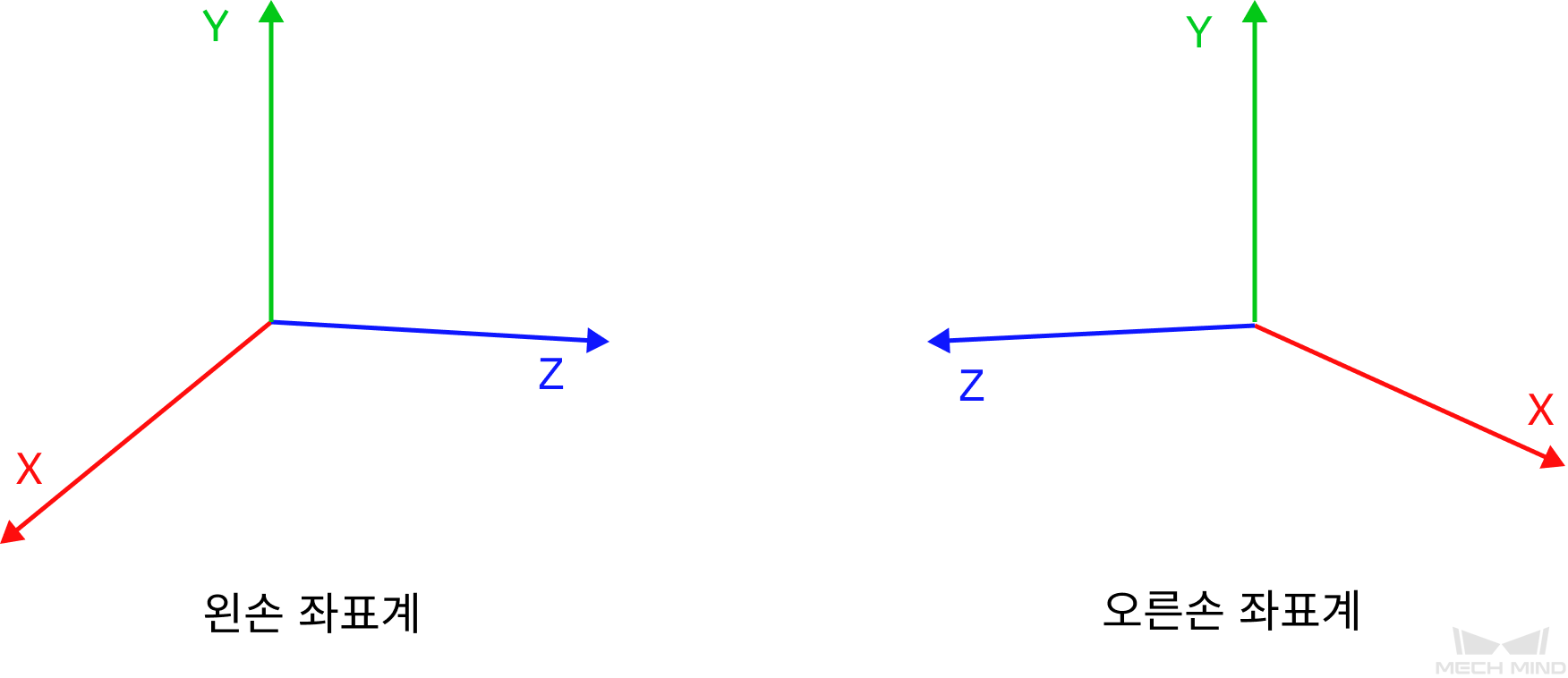
왼손 좌표계와 오른손 좌표계의 판단 방법은 다음과 같습니다.
-
왼쪽 엄지손가락이 X축의 정방향을 가리키고 검지가 Y축의 정방향을 가리키도록 합니다. 중지가 Z축의 정방향을 가리킬 수 있는 경우 이 좌표계를 왼손 좌표계라고 합니다(아래 왼쪽 그림 참조).
-
오른쪽 엄지손가락이 X축의 정방향을 가리키고 검지가 Y축의 정방향을 가리키도록 합니다. 중지가 Z축의 정방향을 가리킬 수 있는 경우 이 좌표계를 오른손 좌표계라고 합니다(아래 오른쪽 그림 참조).
겐트리 로봇이 왼손 좌표계인 경우 후속 캘리브레이션 및 비전 처리를 용이하게 하기 위해 오른손 좌표계로 변경하는 것이 좋습니다. 일반적으로 겐트리 로봇의 XYZ 축에 대한 엔코더 동작의 정방향의 반대를 취해야 합니다. 보통 겐트리 베이스에 설치된 축의 반대를 취한 다음 Mech-Vision에서 오른손 좌표계를 선택하여 캘리브레이션하면 됩니다.
겐트리 로봇에서 이 변경을 수행할 수 있는 경우 Mech-Vision에서 왼손 좌표계만 선택하면 됩니다. 그러면 소프트웨어가 입력 및 출력한 포즈 데이터를 자동으로 변환합니다.
캘리브레이션 원리
겐트리 로봇의 경우 카메라는 일반적으로 로봇의 특정 축(예를 들면 Z축)에 장착됩니다. 즉, 카메라의 설치 방식은 Eye in Hand입니다. 따라서 겐트리 로봇의 캘리브레이션은 카메라 좌표계와 로봇 TCP 좌표계 사이의 상대적 관계를 결정하는 것을 목표로 합니다.
겐트리 로봇의 제한된 자유도와 활동 공간을 고려하여 Mech-Vision 소프트웨어는 TCP 끝단점 터치 방식을 사용하여 캘리브레이션 데이터를 수집하고 캘리브레이션 보드, 카메라 및 로봇 간의 관계를 구성합니다. 또한 겐트리 로봇의 캘리브레이션 프로세스는 여러 캘리브레이션 보드의 포즈 추가를 지원합니다. 자유도가 제한되어 겐트리 로봇이 캘리브레이션 보드의 세 특징점을 터치할 수 없는 경우 여러 캘리브레이션 보드를 사용하고 겐트리 로봇이 여러 캘리브레이션 보드의 세 특징점(세 개의 비동일선)을 터치하도록 제어할 수 있습니다.
겐트리 로봇의 캘리브레이션 원리는 EIH 시나리오에서의 핸드-아이 캘리브레이션(TCP 끝단점 터치) 부분을 참조하십시오.
외부 파라미터 파일의 사용
겐트리 로봇의 캘리브레이션 프로세스는 캘리브레이션 지점에 대한 외부 파라미터 파일을 생성하고 Mech-Vision은 겐트리 로봇의 포즈에 따라 동적 외부 파라미터를 실시간으로 계산합니다. Mech-Vision 프로젝트에서 동적 외부 파라미터를 계산하려면 포인트 클라우드 변환(겐트리) 및 포즈 변환(겐트리) 스텝을 사용하여 카메라 좌표계의 포인트 클라우드/포즈를 겐트리 좌표계로 변환해야 합니다.
프로젝트가 실행 중일 때 겐트리 로봇이 Mech-Mind 비전 시스템과 정상적으로 통신할 수 있는지 확인하십시오. 또한 로봇 프로그램은 Mech-Vision 프로젝트 실행을 트리거할 때 로봇 플랜지 포즈를 제공해야 "카메라에서 이미지를 캡처하기" 스텝에서 이미지를 캡처할 때 로봇 플랜지의 포즈를 성공적으로 얻을 수 있습니다.
|
겐트리 로봇이 왼손 좌표계를 사용하는 경우 통신 구성 요소는 로봇 프로그램에서 보낸 로봇 플랜지 포즈를 오른손 좌표계의 포즈로 자동 변환한 다음 비전 처리를 위해 Mech-Vision으로 보냅니다. 비전 결과가 반환되면 통신 구성 요소는 먼저 Mech-Vision이 출력한 겐트리 좌표계의 포즈를 왼손 좌표계의 포즈로 자동 변환한 다음 로봇 프로그램으로 반환합니다. |