알림
파라미터 설명
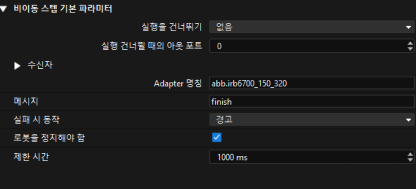
수신자
실제로 DO를 수신하는 개체에 따라 이 파라미터를 설정합니다. 로봇, 표준 인터페이스 또는 Adapter를 선택할 수 있으며 Adapter를 선택하는 경우 Adapter 명칭도 입력해야 합니다. 여러 수신자를 선택할 수 있습니다.
| 이 파라미터가 설정되지 않으면 DO 신호는 소프트웨어에서 수신 대상으로 전송될 수 없습니다. |
Adapter 서비스 명칭
Adapter 서비스 명칭*을 통해 이 스텝의 정보를 획득합니다. 프로젝트에 여러 *알림 스텝이 있는 경우, 모든 알림 스텝은 동일한 *서비스 명칭*을 사용해야 합니다.