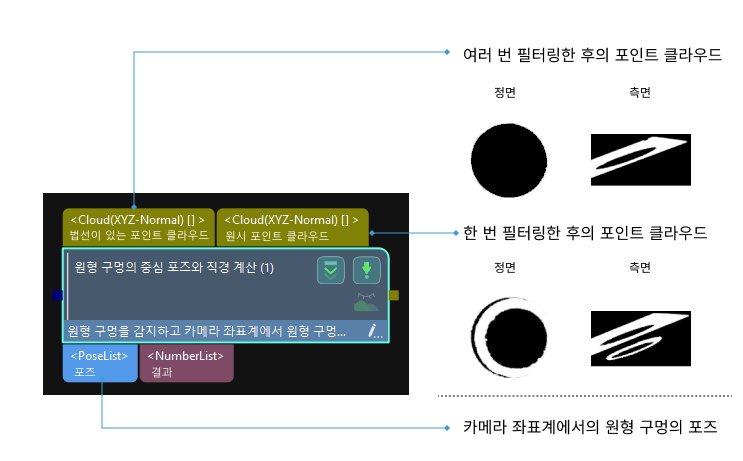
원형 구멍의 중심 포즈와 직경 계산
응용 시나리오
이 프로시저는 주로 대형 공작물의 측정 시나리오에 사용됩니다. 일반적으로 앞에 평면 포인트 클라우드 추출을 연결하여 평면 포인트 클라우드를 얻은 후 포즈를 사용자 정의 좌표계로 변환을 연결하여 기준 좌표계에서의 포즈를 얻습니다.
파라미터 조절 설명
원을 감지하고 측정하기
- ROI
-
파라미터 설명: 이 파라미터는 ROI를 설정하고 원형 구멍의 중심 포즈 및 치수 정보를 읽는 데 사용됩니다.
조정 제안: 측정 모드에서 ROI를 선택하고 정확한 ROI를 설정하는 것이 좋습니다.
|
ROI를 설정할 때는 최대한 원에 맞게 설정해야 합니다. ROI가 정확하지 않으면 원 생성의 정확도에 영향을 미칠 수 있습니다. |
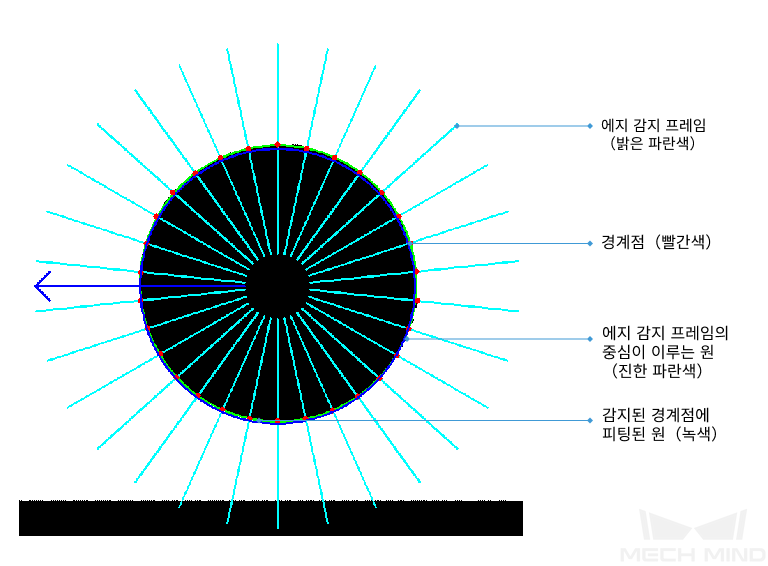
원리: 에지 감지 프레임은 파란색 화살표 방향을 따라 흑백 경계점을 찾고 아래 그림과 같이 감지된 경계점을 피팅하여 원을 생성합니다. 따라서 에지 감지 프레임의 수량이 많을수록 경계점이 많아져 피팅된 원의 정확도가 높아집니다. 에지 감지 프레임의 높이의 절반이 원의 중심에 가까울수록 검출의 가변 범위가 커지고 전후 이미지 중 원의 위치가 변경되어도 여전히 정확한 원을 검출할 수 있습니다.
-
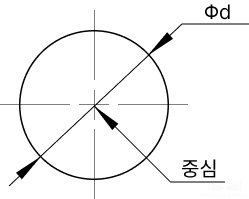
중심 X/Y: 읽어낸 원의 중심 좌표.
-
너비/높이: 읽어낸 원의 실제 치수(아래 그림 d).
-
각도: ROI 각도 설정하기.
- 에지 감지 프레임의 수량
-
파라미터 설명: 이 파라미터는 생성된 원의 에지 감지 프레임 수량을 지정하는 데 사용됩니다. 값이 클수록 생성한 원이 더 정확하고 계산 시간이 더 길어집니다.
기본값: 500
조정 제안: 기본 파라미터 값에서 원이 요구 사항에 부합하면 이 값을 적당히 줄이고 원이 요구 사항에 부합하지 않으면 이 값을 적당히 높입니다.
- 에지 감지 프레임의 절반 높이
-
파라미터 설명: 이 파라미터는 생성된 원의 에지 감지 프레임 길이를 지정하는 데 사용됩니다. 에지 감지 프레임이 원의 중심에 가까울 수록 감지할 수 있는 가변 범위가 더 큽니다. 이 파라미터가 클수록 계산 시간이 더 길고 이 파라미터가 작을수록 계산 시간이 더 짧습니다. 이 값이 너무 크면 동일한 에지 감지 프레임이 원 전체를 관통하고 두 개의 교점이 감지되거나 나머지 원이 아닌 외곽점이 감지되어 정확하지 않은 피팅 원이 생성될 수 있습니다.
기본값: 110
조정 제안: ROI가 마침 전체 원을 선택할 수 있는 경우(반원만 있는 경우 전체 원을 선택할 수 없음), 이 값을 원의 반경으로 설정하는 것이 좋습니다(ROI 너비/높이 값의 절반으로 계산할 수 있음). 완전히 선택하지 못하거나 이미지에 다른 에지가 있는 경우 실제 측정 효과에 따라 결정할 수 있습니다.
원기둥 범위 내의 포인트 클라우드를 추출하기
|
이 프로시저를 실행할 때 포인트 클라우드는 카메라 좌표계에서 포인트의 기준 좌표계로 변환됩니다. 파라미터 그룹의 파라미터는 포인트의 기준 좌표계를 기반으로 포인트의 Z축 범위를 설정합니다. |
- Z 값 하한
-
파라미터 설명: 이 파라미터는 포인트의 기준 좌표계에서 Z 축의 최소값을 지정하는 데 사용되며 단위는 밀리미터(mm)입니다. 해당 값이 작을수록 추출된 포인트가 많고 값이 클수록 추출된 포인트가 적습니다.
기본값: -0.500mm
- Z 값 상한
-
파라미터 설명: 이 파라미터는 포인트의 기준 좌표계에서 Z 축의 최대값을 지정하는 데 사용되며 단위는 밀리미터(mm)입니다. 해당 값이 작을수록 추출된 포인트가 적고 값이 클수록 추출된 포인트가 많습니다.
기본값: 0.500mm