3D 매칭
응용 시나리오
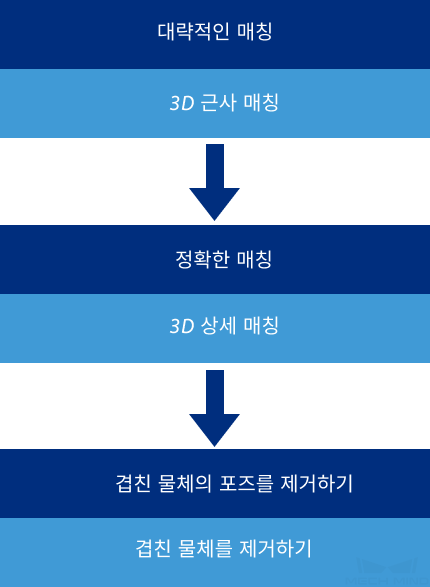
이 프로시저는 일반적으로 포인트 수가 제한을 넘은 포인트 클라우드를 제거하기 프로시저 후에 사용되며 3D 근사 매칭 V2 및 3D 상세 매칭 스텝을 통해 점차적으로 피킹 포즈를 최적화하고 겹친 물체의 포즈를 제거합니다.
매칭 프로세스
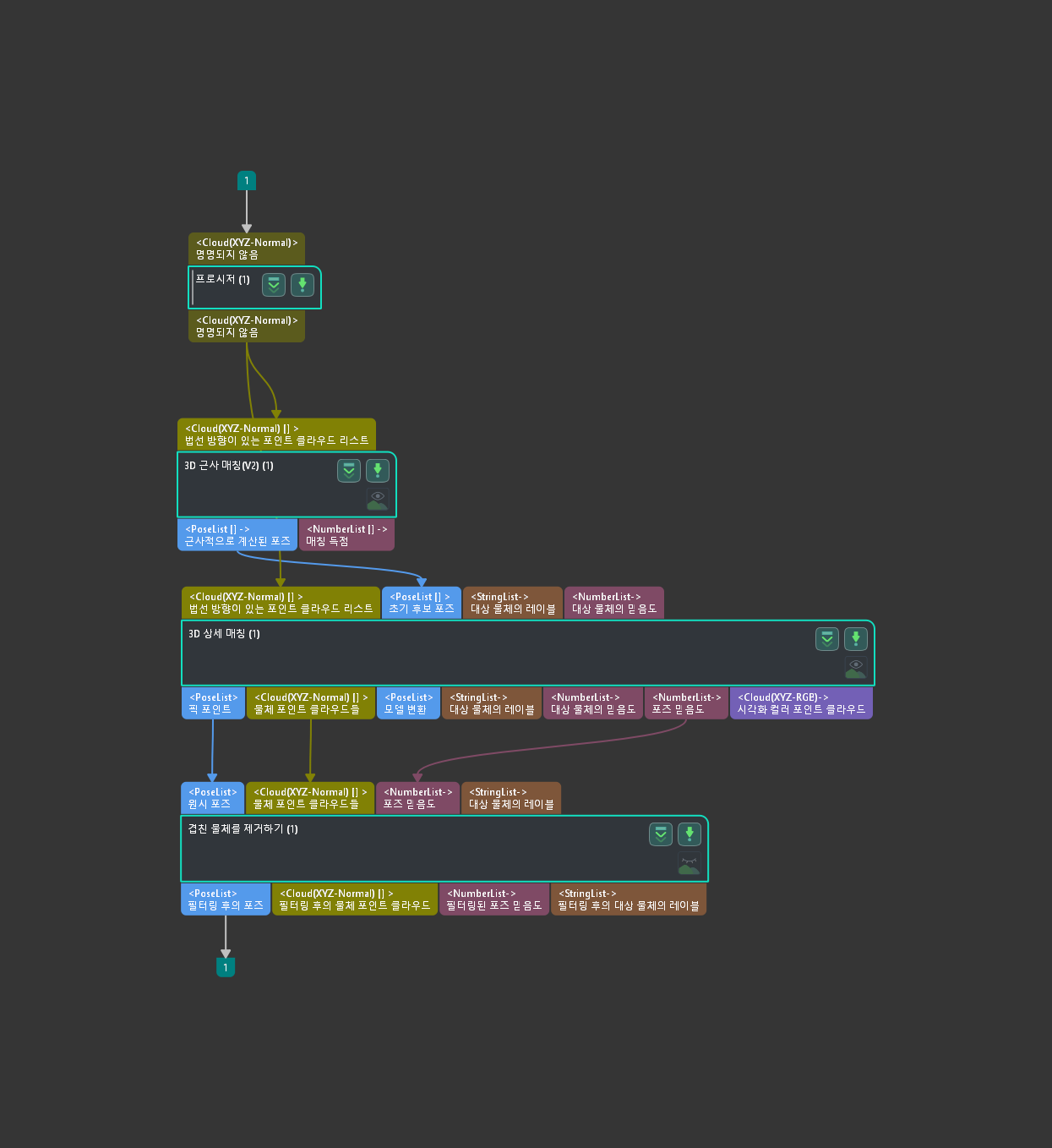
이 프로시저의 매칭 프로세스는 다음 그림과 같습니다.
-
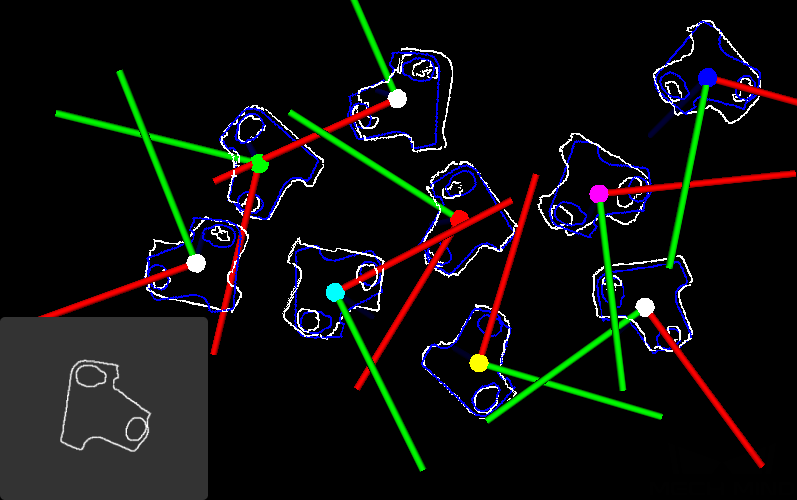
“포인트 수가 제한을 넘은 포인트 클라우드를 제거하기” 프로시저를 사용하여 필터링된 포인트 클라우드를 획득한 후에 먼저 필터링된 포인트 클라우드를 이 프로시저에 입력하여 다음 그림과 같이 “3D 근사 매칭 V2” 스텝을 통해 인식된 물체의 초기 포즈를 계산합니다. 초기 포즈는 여러 개가 있을 수 있습니다.
-
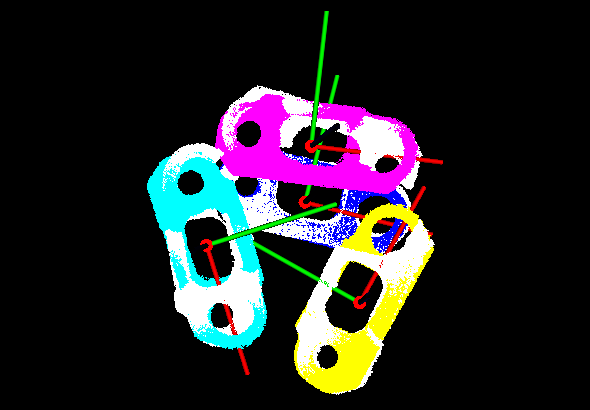
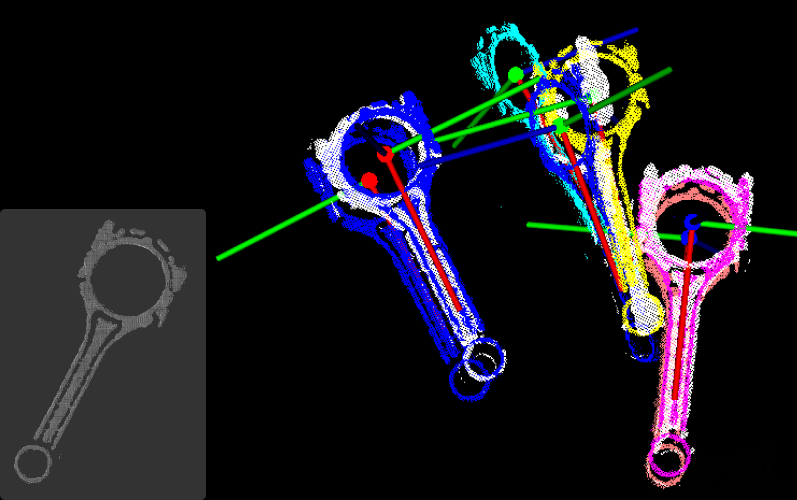
그 다음에 “3D 상세 매칭” 스텝이 초기 포즈에 대해 상세 매칭을 수행하고 아래 그림과 같이 정확한 포즈를 얻을 수 있습니다.
-
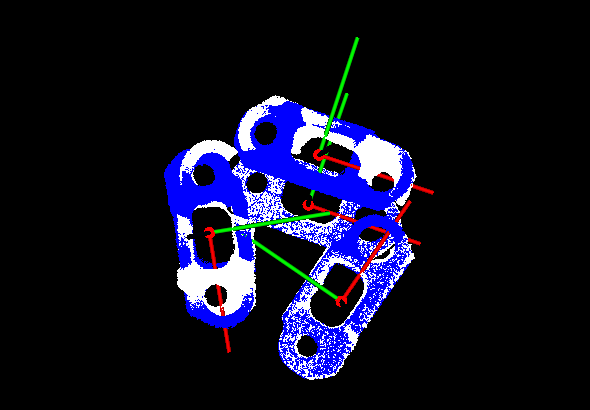
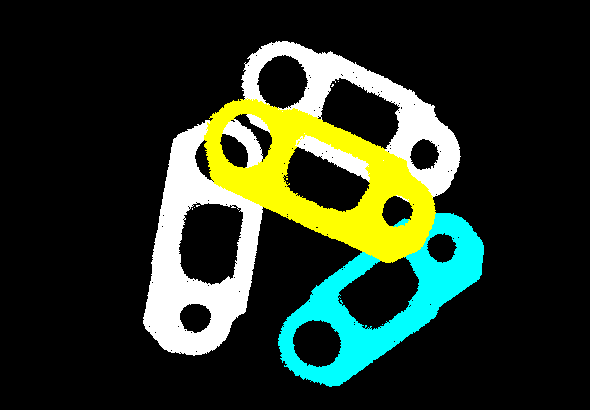
마지막으로 수평적 방향에서 인식된 물체의 포즈를 필터링한 후 겹친 물체를 제거하기 스텝과 연결하여 물체의 Z축 방향에 따라 겹친 물체를 제거하며 상위 레이어에서 피킹할 수 있는 포즈를 필터링합니다. 다음의 그림과 같이 제거된 겹친 물체의 포인트 클라우드는 흰색으로 표시됩니다.
파라미터 조절 설명
모델 설정
- 모델 명칭
-
기본값: 비어 있음.
조절 설명: 이 프로시저 실행하기 전에 물체의 포인트 클라우드 모델을 추가해야 합니다. 물체의 포인트 클라우드 모델을 통해 시나리오에 있는 물체와 매칭을 하며 시나리오에 있는 물체를 인식하고 해당 포즈를 획득합니다. 매칭 모델 및 픽 포인트 편집기를 사용하여 포인트 클라우드 모델을 생성하고 저장한 후에 여기 드롭다운 목록에서 저장된 포인트 클라우드 모델을 선택할 수 있습니다.
매칭 설정
- 매칭 모드
-
기본값: Edge
값 리스트: Surface(면 매칭), Edge(에지 매칭).
조절 설명: 매칭 모드에는 Surface(면 매칭) 및 Edge(에지 매칭)를 포함합니다. 사용된 모델 포인트 클라우드가 물체의 에지인 경우 아래 그림과 같이 에지 매칭을 선택합니다.
사용된 모델 포인트 클라우드가 물체의 표면인 경우 아래 그림과 같이 표면 매칭을 선택합니다.
- 샘플링 후 모델의 예상 포인트 수
-
기본값: 300
조절 설명: 이 파라미터는 다운 샘플링을 한 후의 포인트 클라우드 모델에 있는 포인트의 수를 설정하는 데 사용됩니다. 자동 다운 샘플링한 후 얻는 포인트의 수는 이 값에 가깝습니다. 이 값이 작을수록 샘플링 후 포인트 클라우드의 포인트 수가 적어지고 매칭 정확도가 낮아집니다.
| 파라미터 값 | 300 | 600 |
|---|---|---|
예시 그림 |
|
|
포인트 수 |
276 |
632 |
- 매칭 속도
-
기본값: Standard
값 리스트: HighSpeed、Standard、HighPrecision
조절 설명: 프로젝트 수요에 따라 적절한 모드를 선택해야 합니다.
-
HighSpeed: 속도가 가장 빠르지만 정밀도가 비교적 낮은 모드.
-
Standard: 비교적으로 안정적인 모드.
-
HighPrecision: 정밀도가 가장 높지만 속도가 비교적으로 느린 모드.
-
- 믿음도
-
기본값: 0.6
조절 설명: 이 파라미터는 포즈 매칭 점수와 비교하여 더욱 정확한 포즈 매칭 결과를 얻는 데 사용됩니다. 일반적으로 결과 검증 검색 반경과 함께 사용됩니다. 포즈 매칭 점수가 이 값보다 큰 경우 이 포즈 매칭 결과는 유효한 것으로 간주됩니다. 다른 파라미터는 변경되지 않고 이 값이 높을수록 포즈 매칭 결과가 더 정확해집니다.
실제 응용 과정에서 먼저 적절한 결과 검증 검색 반경을 설정(더블 클릭하여 이 스텝 프로시저로 들어가 “3D 상세 매칭” 스텝 파라미터에서 이 파라미터를 설정함)해야 합니다. 그 다음 실제 상황에 따라 믿음도를 설정하십시오.
결과 검증 검색 반경의 값은 포즈 매칭 점수에 영향을 미칩니다. 이 값이 클수록 포즈 매칭 결과에 대한 평가 기준이 그리 엄격하지 않습니다. 즉 포즈 매칭의 결과가 좋지 않더라도 높은 점수를 얻을 수 있다는 것입니다. 반면에 이 값이 작을 수록 포즈 매칭 결과에 대한 기준이 엄격해집니다. 물체의 포인트 클라우드에 맞춰 설정해야 하며, 포인트 클라우드가 희박한 경우에는 결과 검증 검색 반경의 값을 조금 더 크게 설정해야 합니다.
파라미터 조절 과정에서 초기 결과 검증 검색 반경 값을 설정한 후 스텝을 실행하고 시각화 구역을 통해 포즈 매칭 효과를 관찰하여 이를 포즈 매칭 점수와 비교할 수 있습니다. 매칭 효과가 매칭 점수와 일치하지 않을 경우 실제 상황에 따라 매칭 효과가 매칭 점수와 일치할 때까지 결과 검증 검색 반경 값을 조절할 수 있습니다.
결과 검증 검색 반경의 값을 적절하게 설정한 후 실제 수요에 따라 믿음도를 설정하며 포즈 매칭 점수가 믿음도보다 높은 포즈 매칭 결과를 획득합니다.
결과 설정
- 최대 출력 수량
-
기본값: 10
값 리스트: 1~100
조절 설명: 이 파라미터는 출력될 수 있는 포즈 매칭 결과의 최대 개수를 나타냅니다. 포즈 매칭 결과가 여러 개 있는 경우 포즈 매칭 점수에 따라 내림차순으로 포즈 매칭 결과를 정렬한 후 설정된 최대 출력 수량 에 따라 포즈 매칭 점수가 높은 포즈 매칭 결과를 출력합니다.
실제 출력한 포즈 매칭 결과 개수는 설정된 최대 출력 수량과 일치하지 않을 수 있습니다. 최대 출력 수량을 5로 설정하고 실제로 포즈 매칭 결과가 총 3개밖에 없다면 최종 출력되는 포즈 매칭 결과 개수는 3개가 됩니다.