계획 기록
이 부분은 주로 계획 기록에 관한 내용입니다. 다음과 같이 몇 부분으로 나눠집니다:
소개
계획 기록 결과의 전체 구조는 Mech-Viz 계획의 전 과정을 상세하고 완전하게 기록하는 트리 구조입니다.
로그와 비교하면 계획 기록은 계획의 각 노드(특히 실패한 노드)를 자세히 볼 수 있습니다.
-
일부 오류는 일련의 오류로, 하나의 자식 노드 계획이 실패하면 전체 계획이 실패합니다. 예를 들어 어떤 관절 각도를 잘못 설정하면 로봇은 계획한 위치에 도달할 수 없습니다.
-
일부 오류는 일련의 오류로, 하나의 자식 노드 계획이 실패하면 전체 계획이 실패합니다. 예를 들어 Mech-Vision에서 출력한 픽 포인트에서 노드 중 하나라도 성공적으로 실행되면 해당 픽 포인트를 사용하여 물체를 피킹할 수 있음을 의미합니다.
| 프로젝트를 실행하는 과정에서 실패한 노드에 중점을 둘 수 있습니다. |
충돌 결과 시각화
충돌 계산 & 기록
일반적으로 충돌 계산 & 기록은 충돌 결과의 시각화에 사용됩니다.
계산 설정의 파라미터를 각 호부 방식에 해당한 완전한 충돌을 계산하기 + 계획 기록에 저장하기로 설정하면 소프트웨어가 완전한 충돌을 기록하고 계획 기록으로 저장할 것입니다.
계획 기록 중 충돌 감지 결과의 그래픽 프롬프트
소프트웨어의 왼쪽 상단 메뉴 바에서 “표시” 버튼을 클릭한 다음 계획 시 충돌을 표시하기(기본적으로 소프트웨어를 부팅할 때 이미 선택되어 있음)를 선택합니다.
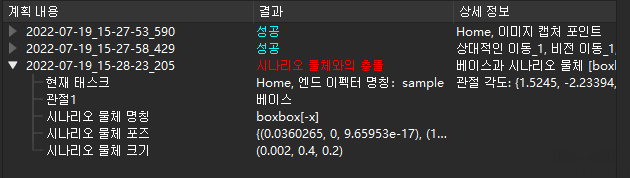
시나리오 충돌 |
충돌이 발생하는 스텝의 이름을 클릭하면 충돌하는 모든 물체가 하이라이트로 표시됩니다. |
충돌이 발생하는 물체를 클릭하면 해당 충돌 물체가 하이라이트로 표시됩니다. |
|
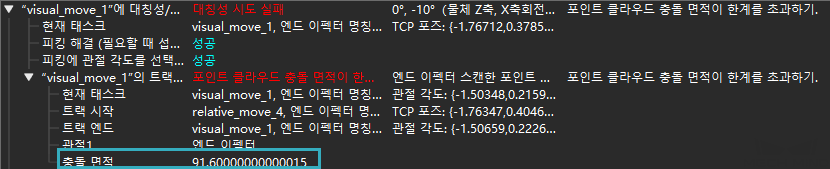
포인트 클라우드 충돌 |
충돌이 발생하는 스텝의 이름을 클릭하면 충돌하는 모든 물체가 하이라이트로 표시됩니다. |
충돌 부피를 클릭하면 충돌한 포인트 클라우드가 하이라이트로 표시됩니다. |
|
포인트 클라우드가 충돌할 때 충돌을 기록하지 않으면 나머지 충돌 물체만 하이라이트로 표시됩니다. |
|
대상 물체 충돌 |
대상 물체가 충돌하면 하이라이트로 표시됩니다. |