포인트 클라우드 처리(GPU)
|
이 스텝의 내용은 오래되어 유지 보수가 중단된 상태입니다. 새 버전 스텝 포인트 클라우드의 법선 벡터를 계산하고 필터링하기를 사용하십시오. 만약 긴급하게 이 스텝에 대한 추가 정보가 필요한 경우 (docs@mech-mind.net) 로 문의하십시오. |
응용 시나리오
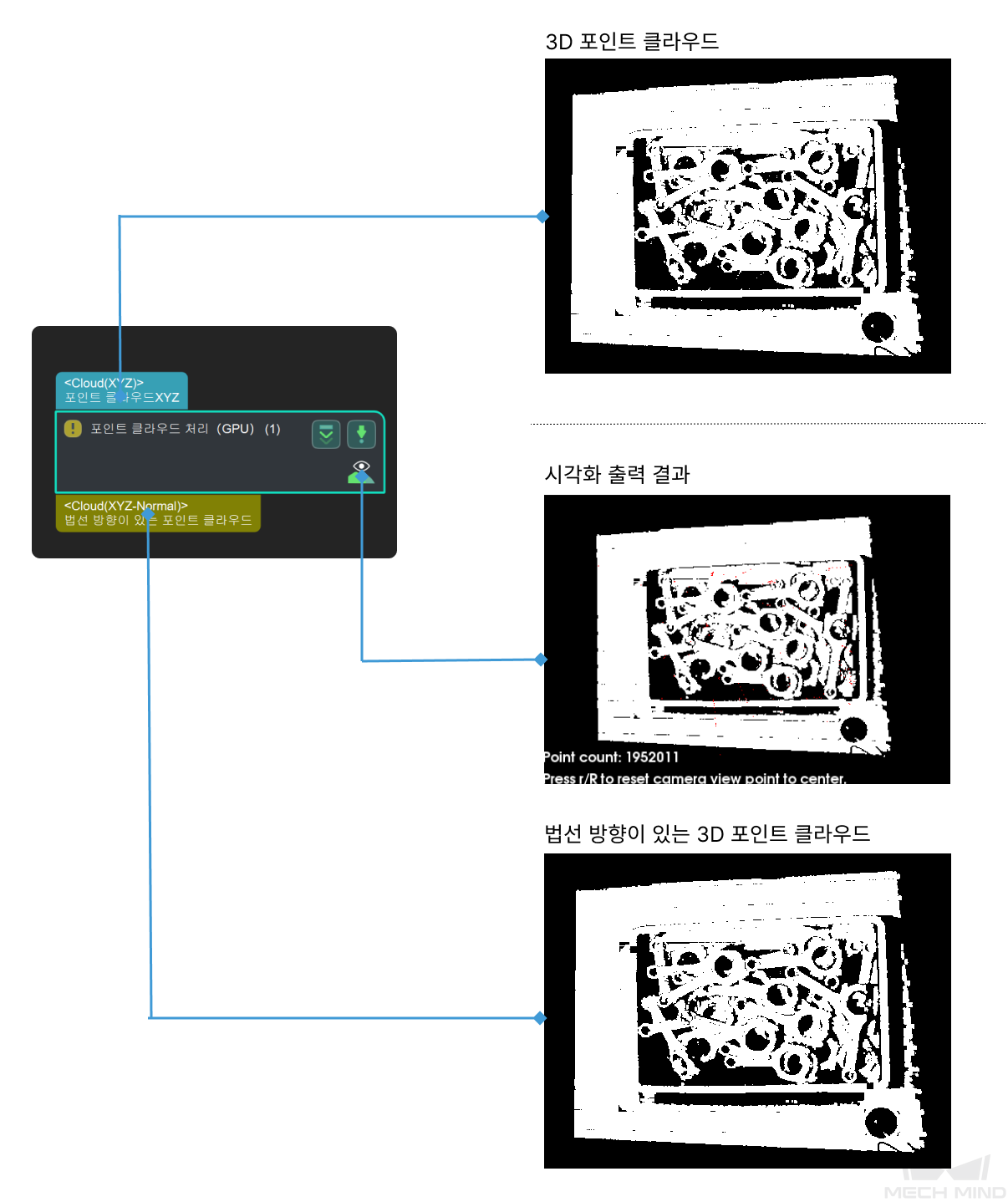
카메라에서 이미지를 캡처하기, 뎁스 맵을 포인트 클라우드로 전환하기 스텝 뒤에 사용되고 원시 포인트 클라우드에 법선 벡터를 추가하고 노이즈와 이상치를 제거합니다.
파라미터 설명
- Calculation Settings
- 일괄 처리
-
파라미터 설명: 이 파라미터는 포인트 클라우드를 일괄 처리할지 여부를 결정하는 데 사용됩니다.
기본값: 선택하지 않음
조절 제안: 포인트 클라우드 포인트가 너무 많고 컴퓨터 그래픽 카드 메모리가 너무 작은 경우 이 파라미터를 선택하는 것이 좋습니다.
- 법선 방향을 계산할 때의 반경
-
파라미터 설명: 이 파라미터는 법선 벡터를 계산할 때 검색 반경을 설정하는 데 사용됩니다.
기본값: 5.000 mm
- Removal of Sparse Points
- 이상치 제거
-
파라미터 설명: 이 파라미터는 포인트 클라우드의 이상치를 제거할지 여부를 결정하는 데 사용됩니다.
기본값: 선택하지 않음
조절 설명: 이 파라미터를 선택한 후 이상치는 설정된 이상치 역치에 따라 제거될 수 있습니다.