일반적인 빨판 구성기
이 부분에서는 일반적인 빨판 구성기 및 관련 설정에 대해 소개하겠습니다.
빨판 구성 프로세스
-
빨판 구조 구성
-
실제 사용하는 빨판의 블록 수에 따라 블록 수 파라미터를 설정하십시오. 여러 개 블록을 하나의 DO 신호로 컨트롤하면 한 완전한 블록으로 간주되어 하나의 큰 블록만 만들면 됩니다.
-
빨판 블록 사이의 실제 거리에 따라 간격 파라미터를 설정하십시오.
-
빨판 블록의 실제 치수에 따라 블록 길이/너비 파라미터를 설정하십시오.
-
완충구역 두께 파라미터를 충돌 감지에 사용되는 스펀지층 두께, 즉 TCP 평면 아래의 스펀지층의 두께로 설정하십시오.
-
-
말단장치 구성 창에서 설정한 TCP에 따라 각도 파라미터를 설정하십시오.
-
실제 상황에 따라 DO/DI 활성값 파라미터를 설정하십시오.
-
DI 감지 포인트 구성
-
+ 버튼을 클락하면 DI 감지 포인트가 새로 추가됩니다. 감지 포인트의 DI값은 기본적은 0이고 빨판 가운데에 위치합니다.
-
X/Y파라미터를 수정하거나 감지 포인트를 직접 드래그하여 위치를 변경합니다.
-
DI 파라미터를 수정하여 감지 포인트의 번호를 변경합니다.
-
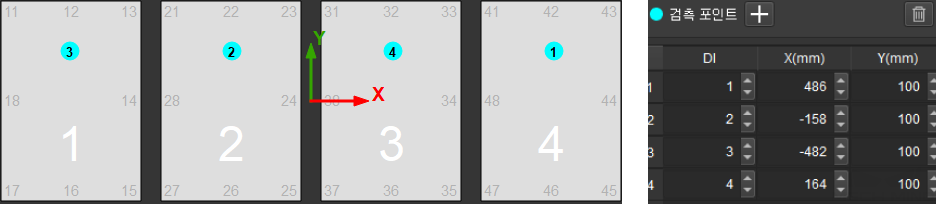
감지 포인트를 삭제하려면 감지 포인트를 먼저 선택한 다음에 ![]() 를 클릭하십시오.
를 클릭하십시오.
-
실제로 빨판의 각 파티션을 컨트롤하는 포트 번호에 따라 해당한 DO 값을 입력하십시오.
-
버튼을 클릭하여 빨판 구성을 해당 말단장치의 구성으로 저장하십시오.