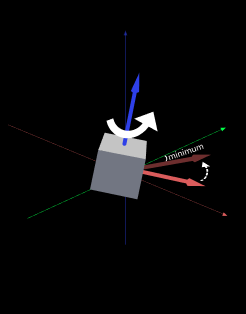
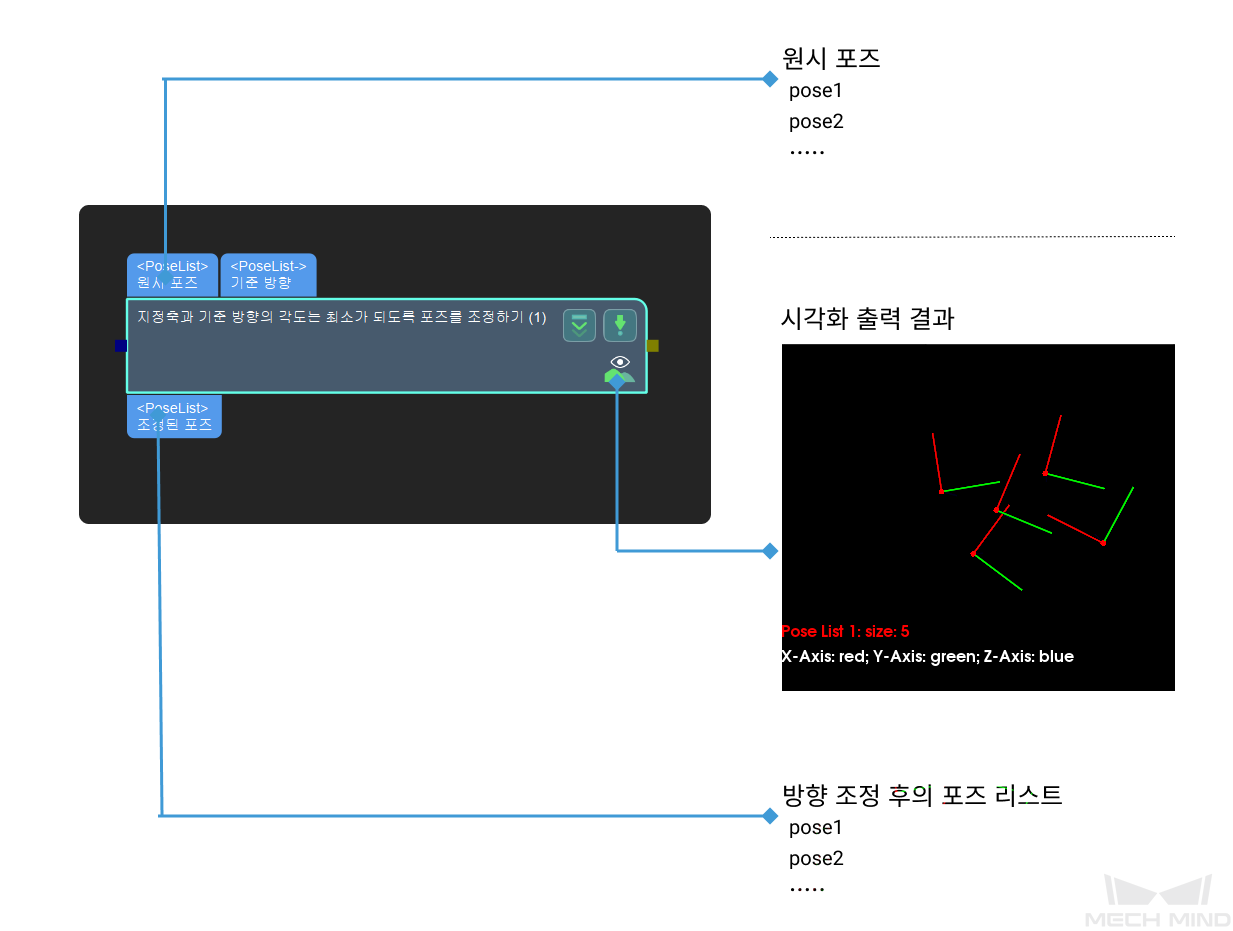
지정축과 기준 방향의 각도가 최소가 되도록 포즈를 조정하기
응용 시나리오
이 스텝은 일반적으로 포즈 방향을 조정해야 하는 다양한 시나리오에서 사용됩니다.
이 스텝은 구 버전이며 더 풍부한 기능을 가진 새 버전 스텝 목표 방향으로 포즈를 회전하기(제약 없음)로 대체해야 하며 3D 벡터를 빠르게 만들기 스텝과 함께 사용됩니다.
파라미터 설명
시각화 설정
- 포즈 시각화 설정
-
파라미터 설명: 이 파라미터는 표시할 포즈 유형을 지정하는 데 사용됩니다.
값 리스트:
-
입력 포즈만 표시하기
-
출력 포즈만 표시하기
-
입력과 출력 포즈를 함께 표시하기
기본값: 출력 포즈만 표시하기
-
기준점을 사용하기
파라미터 설명: 이 파라미터는 기준 방향을 계산하기 위해 기준점을 사용할지 여부를 선택하는 데 사용됩니다. 이 항목을 체크한 후 기준점을 사용하기 파라미터 그룹을 설정해야 합니다.
기본값: 선택하지 않음.
조절 설명: 기준점을 사용하여 기준 방향을 계산할 때만 선택하십시오. 구성된 방향은 입력한 포즈에서 기준점을 가리키는 방향입니다.
기준점 설정
- 상대 Z값을 사용하기
-
파라미터 설명: 이 파라미터는 기준점의 Z 값을 재정의할지 여부를 선택하는 데 사용됩니다. 기준점 Z 값 = 원시 포즈 Z 값 + 상대 값
기본값: 선택하지 않음.
- X
-
파라미터 설명: 이 파라미터는 기준점의 X 값 좌표를 나타냅니다.
기본값: 0.0000
- Y
-
파라미터 설명: 이 파라미터는 기준점의 Y 값 좌표를 나타냅니다.
기본값: 0.0000
- Z
-
파라미터 설명: 이 파라미터는 기준점의 Z 값 좌표를 나타냅니다.
기본값: 0.0000
- 상대 Z
-
파라미터 설명: 이 파라미터는 Z 방향의 평행 이동 벡터를 나타냅니다. 상대 Z값을 사용하기를 선택한 경우 이 파라미터를 설정해야 합니다.
기본값: 0.0000
축의 설정
- 고정축의 방향
-
파라미터 설명: 이 파라미터는 포즈가 회전할 때 고정 축을 지정하는 데 사용됩니다.
값 리스트: X, Y, Z
기본값: Y
- 회전해야 할 축의 방향
-
파라미터 설명: 이 파라미터는 지정된 방향으로 회전하는 축, 즉 회전해야 하는 축을 선택하는 데 사용됩니다.
값 리스트: X, Y, Z
기본값: Z
기준 방향 설정
- X
-
파라미터 설명: 이 파라미터는 기준점의 X 방향 벡터를 나타냅니다.
기본값: 0.0000
- Y
-
파라미터 설명: 이 파라미터는 기준점의 Y 방향 벡터를 나타냅니다.
기본값: 0.0000
- Z
-
파라미터 설명: 이 파라미터는 기준점의 Z 방향 벡터를 나타냅니다.
기본값: 1.0000