자체 정의한 파렛트 패턴
파라미터 설명
이동 스텝 기본 파라미터
웨이포인트를 전송하기
기본적으로 선택되어 있으며 로봇 등 수신자에 웨이포인트를 전송합니다. 선택하지 않으며 웨이포인트를 전송하지 않지만 해당 웨이포인트는 여전히 경로 계획 중에 있습니다.
후속 비이동 명령을 원활성있게 수행하기
기본적으로 선택되어 있지 않습니다. 이동 스텝 사이에 비이동 스텝(예: “비전 인식”, “DI 체크” 등)이 연결되면 로봇의 경로 계획을 방해하고 실제 로봇이 실행 중일 때 짧은 일시 중지가 발생하여 로봇이 원활하지 않게 실행됩니다. 이 옵션을 선택하면 현재 이동 스텝의 실행 종료를 기다릴 필요가 없고 계속해서 작업 흐름에 따라 실행할 수 있습니다. 이렇게 하면 로봇 실행 광정에서 자주 멈추는 문제를 피할 수 있고 로봇 동작의 원활성을 높일 수 있지만 스텝이 너무 일찍 종료될 수 있습니다.
|
스텝은 일찍 종료되는 이유가 무엇입니까? Mech-Viz 소프트웨어가 실행 중일 때 동시에 로봇에 여러 포즈를 보냅니다. 소프트웨어는 로봇에 보낸 마지막 포즈가 로봇이 반환한 관절 각도와 동일한지 여부만 판단하고 동일하면 로봇이 마지막 위치에 이미 도달했다는 것으로 간주합니다. 예를 들어 경로에는 10개의 이동 스텝으로 구성되고 이동 스텝 5의 포즈는 마지막 이동 스텝의 포즈와 동일합니다. 로봇이 느린 속도로 이동할 때 웨이포인트 5로 이동하고 현재 관절 각도를 Mech-Viz로 보냅니다. 이동 스텝 5의 포즈는 마지막 이동 스텝의 포즈와 동일하기 때문에 Mech-Viz 소프트웨어는 경로 중의 모든 스텝 실행이 이미 완료된 것으로 잘못 판단하여 일찍 명령을 종료합니다. |
배치된 물체와의 충돌을 감지하지 않기
기본적으로 선택되어 있지 않습니다. 즉 이미 배치된 물체와 사이의 충돌을 감지합니다. 이 옵션을 선택하면 로봇, 말단장치 및 배치된 물체 사이의 충돌을 감지하지 않습니다.
팔레타이징 응용 시나리오에 다음과 같은 두 가지 경우가 있습니다.
-
팔레타이징 시나리오에서 상자를 쌓을 때 로봇 자체가 이미 배치된 상자와 접촉할 경우가 있습니다(상자가 압착되거나 변형되지 않음). 이 충돌을 감지하면 Mech-Viz는 충돌을 피하기 위해 다른 배치 포인트를 계획하기 때문에 오히려 파렛트를 완전히 채우지 못하게 됩니다.
-
일반적으로 진공 그리퍼의 TCP는 그리퍼 표면이 아닌 모델 내부에 설정되어 있으며, 이로 인해 물체를 피킹할 때 말단장치와 피킹된 상자 모델이 중첩되는 상황이 발생합니다(소프트웨어는 말단장치와 작업물 사이의 충돌을 감지하지 않음). 로봇은 상자를 놓고 배치한 후 배치된 상자 모델은 시나리오 모델이 되며 이때 소프트웨어는 말단장치와 시나리오 속의 상자 모델과의 충돌을 감지하여 소프트웨어에서 충돌 경보가 발생하여 팔레타이징 스텝을 완료할 수 없습니다.
이 파라미터를 선택하면 소프트웨어는 로봇, 말단장치와 배치된 작업물 사이의 충돌을 감지하지 않고 위 문제를 피할 수 있습니다.
포인트 클라우드 충돌 감지 모드
작업 현장의 실제 상황에 따라 파라미터를 설정하며 일반적으로 Auto*를 사용하면 됩니다. 로봇이 물체를 피킹하기 전의 이동 스텝은 *NOTCHECK 모드, 물체를 피킹한 후의 이동 스텝은 CHECK 모드를 선택할 수 있습니다.
| Auto |
기본값. "비전 이동" 스텝 및 "비전 이동"에 의존하는 "상대적인 이동" 스텝에 대해서만 포인트 클라우드와의 충돌을 감지하고 다른 이동 스텝에 대해 감지하지 않습니다. |
| NOTCHECK |
모든 이동 스텝에 대해 포인트 클라우드와의 충돌을 감지하지 않습니다. |
| CHECK |
모든 이동 스텝에 대해 포인트 클라우드와의 충돌을 감지합니다. |
| 기능을 활성화하면 Mech-Viz 소프트웨어가 경로 계획을 수행할 때 로봇 모델, 말단장치와 포인트 클라우드 사이의 충돌을 감지합니다. 일반적으로 포인트 클라우드 충돌 감지 설정은 로봇이 피킹 과정에서 작업물과의 충돌 여부를 확인하는 것입니다. 공간에 노이즈가 있으면 소프트웨어가 물체 피킹 전의 경로를 계획할 때 로봇 모델, 말단장치 모델이 노이즈와 접촉하므로 포인트 클라우드 사이의 충돌로 잘못 감지하여 소프트웨어의 계획 오류를 초래할 수 있습니다. |
물체의 대칭성을 사용하지 않기
이 파라미터는 *웨이포인트 유형*을 *작업물 포즈*로 설정한 경우에만 적용됩니다. 예를 들어 웨이포인트 유형을 작업물 포즈로 설정한 이동/팔레타이징 스텝에 적용되며 웨이포인트 유형이 JPs 또는 TCP 포즈인 이동 스텝에는 적용되지 않습니다.
| None |
기본값. 모든 축의 대칭성을 사용합니다. |
| AxisZ |
Z축의 대칭성만 사용하지 않습니다. |
| AxisXy |
X, Y축의 대칭성을 사용하지 않습니다. |
| All |
모든 축의 대칭성을 사용하지 않습니다. |
대칭성을 사용하지 않으면 로봇은 물체 포즈에 따라 물체를 정확하게 배치합니다.
|
하지만 일부 특수한 상황에서 물체를 피킹하지 못할 때 중의 *회전 대칭*을 설정할 수 있습니다. 인식된 물체에 대해 물체 대칭성을 설정하고 대칭 각도에 따라 작업물이 여러 개의 후보 포즈를 가질 수 있습니다. Mech-Viz 소프트웨어는 물체 피킹을 계획할 때 기본 포즈를 피킹할 수 없는 경우 후보 포즈를 피킹할 수 있는지 여부를 시도합니다. 회전 대칭 설정을 기반으로 계산된 후보 포즈는 Mech-Vision에서 출력된 원시 포즈와 다르면 물체 배치 포즈의 일관성을 보장할 수 없습니다. |
인덱스
이동 컨트롤
진입/조정/배치 단계에서 관절 운동을 강제로 사용하기
기본적으로 선택되어 있지 않으며 관절 운동을 강제로 사용하지 않습니다.
현장 작업 공간이 제한되어 직선 운동으로 팔레타이징을 수행해야 하는 경우 이 파라미터를 선택하십시오. 제한된 작업 공간으로 인해 싱귤래리티 문제가 발생할 수 있습니다. 이 경우 모든 단계(진입, 조정, 배치)의 로봇 운동을 관절 운동으로 설정할 수 있습니다.
가속도&속도 스케일 비율
| 값 범위 |
0~100%. 기본값: 100%. |
| 응용 시나리오 |
이 파라미터는 파렛트에 접근할 때와 실제로 상자를 배치할 때 로봇의 속도가 다를 때 사용될 수 있습니다. |
| 설명 |
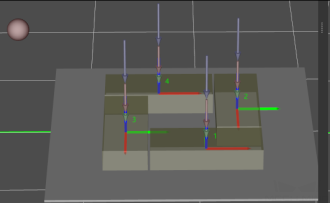
실제로 상자를 배치할 때의 가속도&속도. *가속도&속도 × 가속도&속도 스케일 비율*을 통해 계산됩니다. 로봇이 파렛트 영역에 들어가는 과정은 3가지 단계로 나눌 수 있습니다. 단계1: 보라색 화살표로 표시 - 접근 단계. 로봇이 파렛트(보라색 화살표로 표시) 영역에 접근할 때의 가속도와 속도는 “기본 이동 설정” 패널에서 설정하며, 마지막 두 단계의 가속도와 속도는 *가속도&속도 × 가속도&속도 스케일 비율*을 통해 계산된 값입니다. 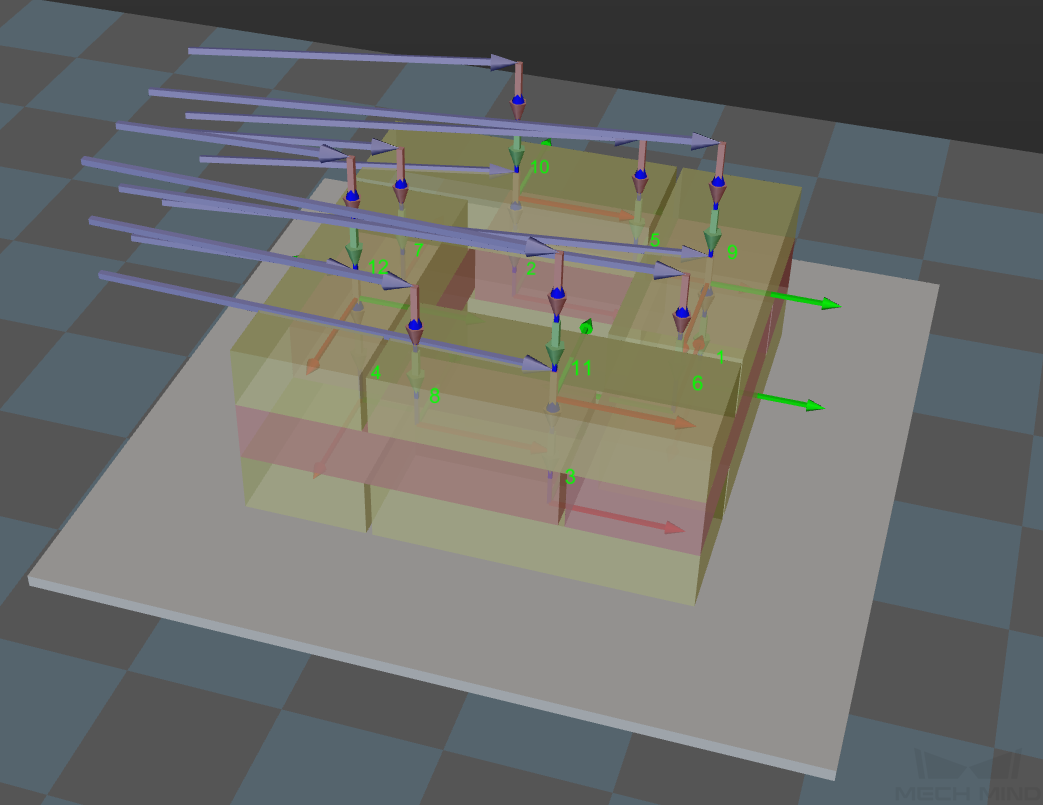
|
진입 및 조정
세 가지 파라미터가 함께 로봇이 파렛트 영역에 들어가는 경로를 결정합니다. 상자가 지정된 각도로 이미 배치된 상자에 접근하도록 진입 경로를 조정하면 상자가 수직으로 배치됩니다. 상자를 수직 경로로 직접 적재할 경우 정확도 및 기타 요인으로 인해 로봇, 상자 및 이미 배치된 상자들 사이에 충돌이 발생할 수 있습니다.
이 파라미터 그룹은 그림에서 빨간색 점으로 표시된 것처럼 상자가 파렛트에 배치될 때 이동될 세 가지 위치(entry, adjust 및 place)를 결정합니다. 아래 그림은 상자가 배치될 위치(정면도)를 보여줍니다.
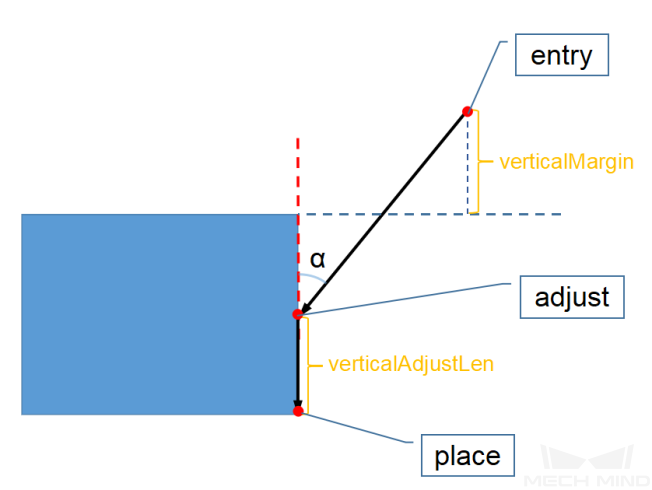
수직 방향에서 길이 비율을 조정하기
| 설명 |
이 파라미터는 위 그림의 "조정"(adjust) 지점의 위치에 영향을 미칩니다. 파라미터 값 = verticalAdjustLen /상자의 높이 |
| 값 범위 |
0~1 |
| 추천값 |
0.5 |
자동 중간점
비전을 통해 파렛트를 조정하기
“비전 인식” 스텝을 통해 파렛트의 위치를 동적으로 조정합니다.

디팔레타이징을 위해
비전 서비스로 사용
기본적으로 선택하지 않습니다. 즉 이 스텝을 비전 서비스로 사용하지 않습니다. 비전 인식 스텝을 위해 비전 서비스를 제공하고 사용자 정의 파렛트 패턴을 생성하려면 이 옵션을 선택하십시오. 따라서 Mech-Vision이 비전 결과를 제공하지 않는 경우에도 Mech-Viz는 디팔레타이징 작업 계속 시뮬레이션할 수 있습니다.
파렛트 패턴 편집기
파렛트 패턴 편집기 내용을 참조하여 파렛트 패턴을 편집하십시오. 편집이 완료되면 파렛트 패턴은 .json 포맷으로 프로젝트 폴더에 저장됩니다.