Modbus TCP 통신 구성
이 부분에서는 Modbus TCP 통신을 구성하는 방법에 대해 설명합니다. 실행하기 전에 로봇을 선택하기를 확인하고 통신 구성 인터페이스로 들어가십시오.
-
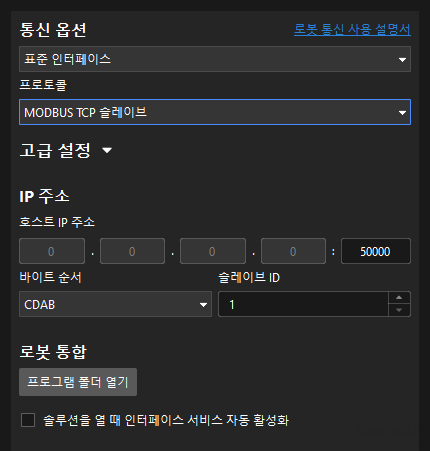
통신 옵션에서 인터페이스 유형을 표준 인터페이스로 선택하고 프로토콜은 MODBUS TCP SLAVE로 선택합니다.
-
IP 주소 에서 다음과 같이 옵션을 설정합니다.
-
호스트(슬레이브) 포트를 입력합니다. 포트 번호는 50000 및 이상으로 설정하는 것이 좋습니다.
-
바이트 순서를 선택합니다. 마스터 스테이션의 부동 소수점 수의 바이트 순서에 따라 표준 빅 엔디안 데이터의 경우 DCBA를 선택하고 표준 리틀 엔디안 데이터의 경우 ABCD를 선택합니다.
-
슬레이브 ID를 선택합니다.
-
-
(선택 사항) 솔루션을 열 때 인터페이스 서비스 자동 활성화를 선택합니다. 다음에 솔루션을 열 때 인터페이스 서비스 시작 할 필요가 없습니다.
-
응용을 클릭합니다.
-
인터페이스 서비스 시작 합니다.
선택한 통신 대상에 따라 표준 인터페이스 구성 작업을 수행합니다.