로봇 라이브러리 도구 사용 가이드
이 부분에서는 "로봇 라이브러리 도구"와 관련된 작업을 소개합니다.
로봇을 도입하기
로봇을 도입하기 전에 온라인 로봇 라이브러리에서 필요한 로봇 모델 파일(파일 접미사는 .mrob)을 다운로드해야 합니다.
|
“온라인 로봇 라이브러리”에서 필요한 로봇을 찾을 수 없는 경우 로봇 모델을 만들어야 합니다. 그다음 Mech-Vision 소프트웨어로 도입합니다. |
다음 방법 중 하나를 사용하여 로봇 모델을 도입할 수 있습니다.
-
방법1
-
마우스 왼쪽 버튼을 누르고 다운로드한 .mrob 파일을 Mech-Vision 소프트웨어 창으로 드래그한 다음 마우스 왼쪽 버튼을 놓습니다.
-
"로봇 도입 완료" 프롬프트 창이 팝업되고 마지막으로 확인을 클릭합니다.
-
-
방법2
-
Mech-Vision 메뉴 바에서 를 클릭합니다.
-
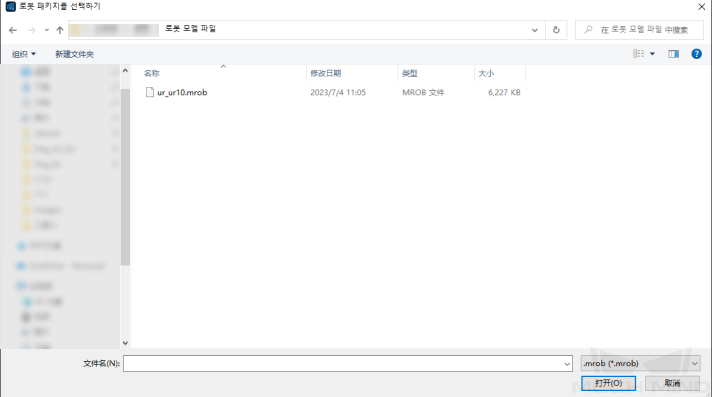
팝업 창에서 다운로드한 .mrob 파일을 선택하고 열기를 클릭합니다.
-
-
"로봇 도입 완료" 프롬프트 창이 팝업되고 마지막으로 확인을 클릭합니다.
현재 로봇을 도출하기
다음 방법을 사용하여 현재 로봇 모델을 도출할 수 있습니다.
-
Mech-Vision메뉴 바에서 를 클릭합니다.
-
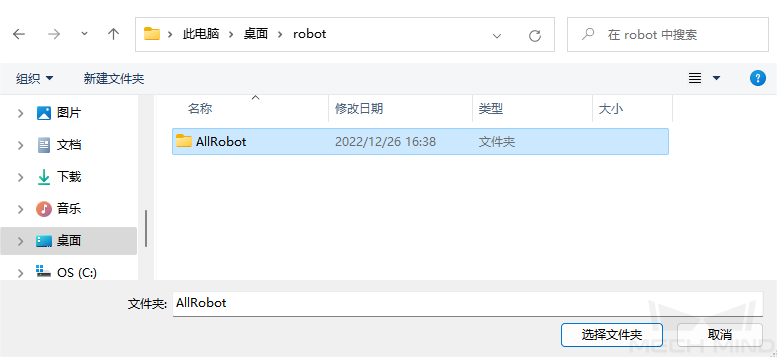
팝업 창에서 도출할 폴더를 선택하고 폴더 선택을 클릭합니다.
-
“로봇 도출 완료” 프롬프트 창이 팝업되고 마지막으로 확인을 클릭합니다.
|
도출이 완료되면 도출한 폴더에 .mrob 파일이 나타납니다. 이 파일은 도출한 로봇 모델입니다. |