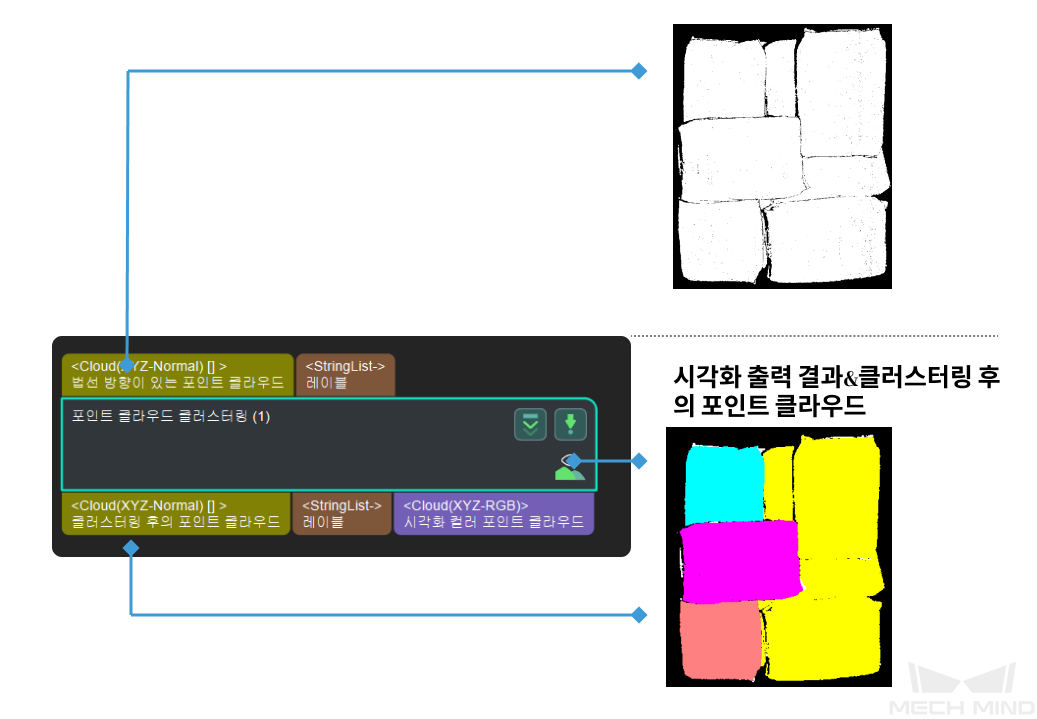
포인트 클라우드 클러스터링

응용 시나리오
일반적으로 포인트 클라우드의 사전 처리 단계에 사용되며 간섭을 줄 수 있는 포인트 클라우드를 제거합니다.
유클리드 거리(EuclideanCluster) 방법과 영역 성장 세그먼테이션(RegionGrowingSeg) 방법을 통하여 포인트 클라우드에 대해 클러스터링을 할 수 있습니다.
포인트 클라우드가 공간적으로 서로 분리되는 경우에 전자(EuclideanCluster)를 사용하고, 공간적으로 연속되지만 연결점 위치에서 곡률 변동이 큰 경우에 후자(RegionGrowingSeg)를 사용하는 것을 권장합니다.
파라미터 설명
클러스터링 알고리즘
기본값: EuclideanCluster
값 리스트: EuclideanCluster, RegionGrowingSeg
조정 설명: 이 파라미터는 클러스터링 방법을 선택하는 데 사용됩니다. 총 2개의 클러스터링 방법이 있습니다. 실제 작업 현장에서 EuclideanCluster 알고리즘을 사용하는 것을 권장하므로 우선 이 알고리즘을 소개하겠습니다.
-
EuclideanCluster: 거리에 따라서 어떤 범주에 속하는지를 판단합니다.
-
RegionGrowingSeg: 법선 방향과 곡률에 따라 어떤 범주에 속하는지를 판단합니다.
EuclideanCluster
- 출력된 클러스터 중에 인접된 포인트 간의 최대 거리
-
기본값: 3.000 mm 파라미터 설명: 이 파라미터는 클러스터링 공차를 설정하는 데 사용되며 단위는 밀리미터 (mm)입니다.
조정 설명: 이 파라미터는 클러스터의 허용 오차입니다. 이 수치를 높이면 멀리 떨어져 있는 포인트들은 같은 클러스터로 분류되고 수치를 작게 설정하면 간격이 가까운 포인트들은 다른 클러스터로 분류될 것입니다.
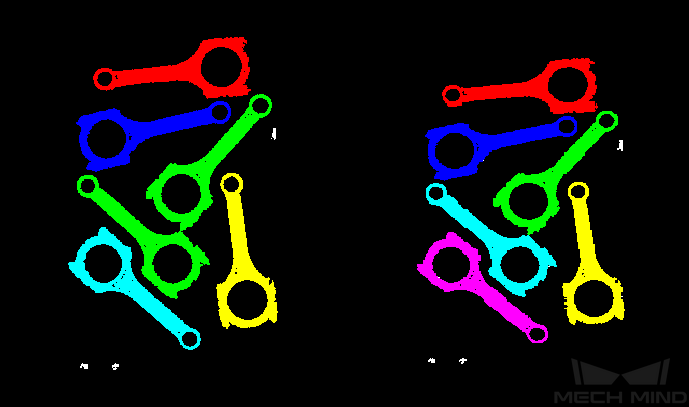
조절 예시: 아래 그림과 같습니다. 아래 그림과 같이 왼쪽 그림은 기본값이 3.000 mm일 때의 결과이고, 오른쪽 그림은 이 파라미터가 5.000 mm로 조정된 결과입니다. 조정 후 중간 녹색 포인트 클라우드가 다른 유형으로 나뉘어져 있음을 알 수 있습니다.
- 코어
-
기본값: 4
조정 설명: 이 파라미터는 영역 성장 과정에서 인접된 포인트의 법선 방향 각도 차이 역치를 조절하는 데 사용되며 이 수치를 높이면 인접된 임의의 포인트의 법선 방향 각도 차이에 대한 허용 오차가 커지며 각도 차이가 큰 포인트들은 여전히 같은 클러스터로 분류될 것입니다.
RegionGrowingSeg
- 인접된 포인트 수
-
기본값: 30
조정 설명: 이 파라미터는 영역 성장 과정의 포인트의 곡률 역치의 상한을 조정하는 데 사용됩니다. 이 값을 크게 조정하면 검색되는 픽셀 수가 증가하여 영역 성장이 빨라지며 이로 인해 얻어지는 클러스터 수가 줄어듭니다.
- 평활도 역치
-
기본값: 4
조정 설명: 이 파라미터는 영역 성장 과정의 인접 포인트의 법선 방향 각도 차이 역치를 조정하는 데 사용됩니다. 이 값을 증가시키면 인접한 픽셀들의 법선 방향 각도에 대한 허용 오차가 커지며, 각도 차이가 큰 점들도 여전히 같은 범주로 분류됩니다.
- 곡률 역치
-
기본값: 1
설명: 이 파라미터는 영역 성장 과정의 포인트의 곡률 역치의 상한을 조정하는 데 사용됩니다.
- 클러스터 안의 최소 포인트 수
-
기본값: 800
조정 설명: 이 파라미터는 클러스터링 후 결과를 필터링하는 데 사용되며 클러스터 안의 최소 포인트 수보다 큰 클래스가 출력됩니다. 이 파라미터를 증가시키면 최종 출력되는 클래스의 수가 줄어들고, 이 파라미터를 감소시키면 최종 출력되는 클래스의 수가 늘어납니다.
클러스터 안의 최대 포인트 수
기본값: 3000000
조정 설명: 클러스터링 클래스를 필터링하기 위한 이 파라미터의 결과는 클래스의 최대 포인트 수보다 작아야 결과가 출력됩니다. 이 파라미터를 증가시키면 최종 출력되는 클래스의 수가 증가하며, 너무 큰 경우 큰 영향을 미치지 않습니다. 이 파라미터를 감소시키면 최종 출력되는 클래스의 수가 줄어듭니다.
조정 예시: 포인트 클라우드 클러스터링 클래스가 5 개 범주 중에서 나온다고 가정하면 포인트는 각각 10000, 20000, 30000, 40000 및 50000입니다. 클러스터 안의 최대 포인트 수가 45000으로 설정되고 최소 포인트 수가 15000으로 설정되면 10000과 50000의 클래스가 필터링되고 출력 포인트 수는 20000, 30000 및 40000입니다.
- GPU 사용
-
기본값: 선택하지 않음
파라미터 설명: 이 파라미터는 GPU를 사용하여 계산 속도를 높일지를 결정합니다.