카메라에서 이미지를 캡처하기
기능 설명
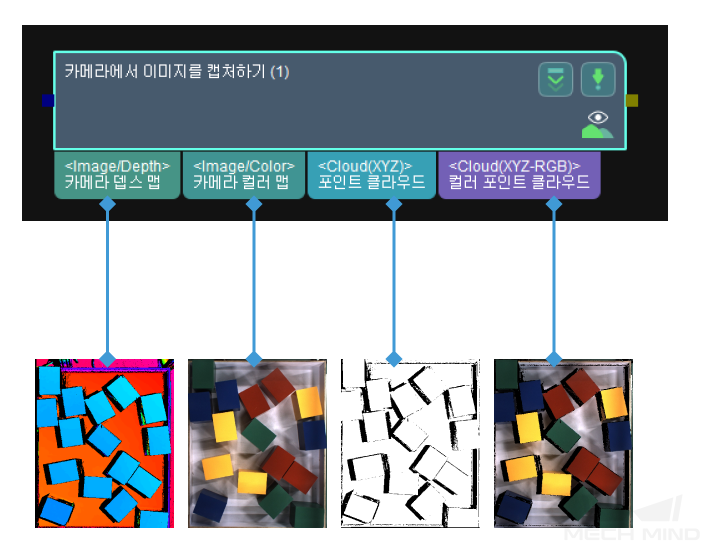
이 스텝은 실제 혹은 가상 카메라를 통해 컬러 맵, 뎁스 맵과 포인트 클라우드를 획득하는 데 사용합니다.
|
이 스텝을 통해 DEEP(V4) 및 LSR(V4) 시리즈 카메라와 연결하는 경우 이 스텝에서 출력된 컬러 맵은 2D맵(뎁스 소스)입니다. 2D맵(뎁스 소스)을 조절하려면 Mech-Eye Viewer에 있는 2D맵(뎁스 소스) 노출 모드 및 2D맵(뎁스 소스) 노출 시간을 조절하십시오. |
응용 시나리오
이 스텝은 일반적으로 Mech-Vision 프로젝트의 첫 입력으로 사용됩니다. Mech-Eye 산업용 3D 카메라 또는 타사 카메라를 통해 데이터를 캡처하거나 가상 모드에서 로컬에 저장된 이미지 데이터를 읽습니다.
파라미터 조절 설명
카메라 설정
- 카메라 유형
-
파라미터 설명: 이 파라미터는 사용할 카메라 유형을 선택하는 데 사용됩니다.
값 리스트:
-
External2D: 외부 2D 카메라.
-
LMI: LMI 카메라.
-
Mech-Eye: 기본값, Mech-Eye 산업용 3D 카메라.
-
Mech-EyeTOF: Mech-Eye 산업용 3D 맞춤형 카메라.
-
|
조절 설명: 서로 다른 유형의 카메라는 다른 파라미터와 대응하여 실제 상황에 따라 조절하십시오.
Mech-Eye
가상 모드가 꺼지면 실제 카메라를 사용하고, 가상 모드가 켜지면 로컬 데이터를 사용합니다. 가상 모드는 기본적으로 꺼져 있습니다.
실제 카메라를 사용하는 경우
- 카메라 ID
-
파라미터 설명: 이 파라미터는 카메라와 연결하고 카메라 캘리브레이션 파라미터 그룹을 선택하는 데 사용됩니다.
설정 방법:
-
카메라 선택 버튼을 클릭하여 사용할 카메라 및 캘리브레이션 파라미터 그룹 선택 창을 엽니다.
-
연결할 카메라를 선택하여
 를 클릭합니다.
를 클릭합니다.카메라가 성공적으로 연결되면
버튼이  가 됩니다.
가 됩니다. -
카메라가 성공적으로 연결된 후 파라미터 그룹을 선택하기 목록 상자에서 캘리브레이션 파라미터 그룹을 선택하여 확인을 클릭합니다.
캘리브레이션 파라미터 그룹을 선택한 다음에 카메라 ID, 카메라 캘리브레이션 파라미터 그룹, Ip 및 Port 파라미터를 자동으로 채워집니다.
-
- 카메라 캘리브레이션 파라미터 그룹
-
파라미터 설명: 이 파라미터는 카메라 캘리브레이션 파라미터 그룹을 지정하는 데 사용됩니다.
- IP
-
파라미터 설명: 이 파라미터는 카메라 IP 주소를 표시하므로 변경하지 마십시오.
- Port
-
파라미터 설명: 이 파라미터는 카메라 포트 번호를 표시하여 변경하지 마십시오.
|
IP 및 포트 번호는 표시에만 사용됩니다. 이 두 파라미터를 변경하면 카메라 연결이 끊어질 수 있습니다. |
- 타임아웃
-
파라미터 설명: 이 파라미터는 카메라가 데이터를 수신한 후 클라이언트에 데이터를 전송할 때까지의 최대 응답 시간을 설정하는 데 사용하며 단위는 초(s)입니다. 다음과 같은 두 가지 경우가 있습니다.
-
카메라는 최대 시간에 성공적으로 연결하지 않습니다.
-
카메라는 최대 시간에 성공적으로 데이터를 캡처하지 않습니다.
기본값: 20s
-
- 카메라 재연결 횟수
-
파라미터 설명: 이 파라미터는 연결 시 오류가 발생한 경우, 카메라에 다시 연결할 수 있는 최대 횟수를 설정하는 데 사용합니다.
기본값: 3
- 파라미터 그룹 명칭
-
파라미터 설명: 이 파라미터는 카메라 파라미터 그룹을 선택하는 데 사용되며 카메라는 선택된 파라미터에 따라 데이터를 캡처합니다.
|
Mech-Eye Viewer에서 파라미터 그룹을 추가/삭제할 수 있습니다. |
- 카메라 모델
-
파라미터 설명: 이 파라미터는 현재 연결된 카메라의 모델을 표시하는 데 사용하며 읽기 전용 파라미터입니다.
- 2D 맵 유형
-
파라미터 설명: 이 파라미터는 카메라에서 출력된 2D 맵 유형을 설정하는 데 사용됩니다.
값 리스트:
-
Internal IR Image: 기본값. 2D 맵(뎁스 소스), 뎁스 맵 좌표계와 동일하여 수정할 필요가 없습니다.
-
External Color Image: 2D 맵(텍스처), 수정해야 사용할 수 있습니다. 이 파라미터를 사용하려면 뎁스 맵 좌표계로 수정하기를 선택해야 합니다.
-
LSR(V4) 시리즈와 DEEP(V4) 시리즈의 컬러 카메라에만 적용됩니다.
- 뎁스 맵 좌표계로 수정하기
-
파라미터 설명: 이 파라미터는 외부 컬러 맵(External Color Image) 좌표계를 뎁스 맵 좌표계로 수정하는 데 사용합니다.
기본값: 선택함.
|
2D 맵 유형은 External Color Image인 경우 이 파라미터를 설정할 수 있습니다. |
뎁스 배경 제거 설정
- 뎁스 맵으로 배경을 제거하기
-
파라미터 설명: 이 파라미터는 뎁스 맵의 배경 정보를 제거하는 데 사용됩니다.
기본 값: 선택하지 않음.
- 뎁스 맵 배경 이미지
-
파라미터 설명: 이 파라미터는 배경의 뎁스 맵을 캡처하거나 읽는 데 사용됩니다.
기본값: depth_background.png
설정 방법:
-
배경 뎁스 맵 파일 선택 버튼을 클릭하여 배경 설정 화면으로 들어갑니다.
-
로컬에 사용할 수 있는 배경 이미지가 있으면 2단계를 참조하십시오.
-
로컬에 사용할 수 있는 배경 이미지가 없으면 3단계를 참조하십시오.
-
-
···를 클릭하여 이미지를 선택하며 확인을 클릭하면 뎁스 맵 배경 이미지가 선택되었습니다.
-
배경 설정 화면 오른쪽에 있는 감지된 카메라에서 카메라를 선택하고
를 클릭하여 카메라와 연결합니다.카메라가 성공적으로 연결되면 왼쪽의 이미지 뷰어에서는 카메라에서 캡처된 뎁스 맵을 표시합니다.
-
뎁스 맵을 업데이트하려면 한번 캡처나 연속 캡처를 클릭하면 됩니다.
-
배경 이미지 파일 명칭을 변경하려면 배경 이미지에서 파일 명칭을 입력하면 됩니다.
-
확인을 클릭하면 뎁스 맵 배경 이미지가 선택되었습니다.
-
- 배경 뎁스의 변동
-
파라미터 설명: 이 파라미터는 물체에서 포인트의 뎁스와 배경 이미지의 뎁스를 비교하는 데 사용되며 단위는 밀리미터(mm)입니다. 포인트의 뎁스와 배경 이미지 뎁스의 값은 이 값보다 작을 때 포인트는 배경의 포인트로 간주되어 제거됩니다.
기본 값: 10mm
- 재캡처 횟수
-
파라미터 설명: 이 파라미터는 카메라 수집 시간 초과로 인해 카메라가 데이터 캡처에 실패한 경우 카메라가 데이터를 캡처하는 총 횟수를 지정하는 데 사용됩니다.
기본값: 3
권장값: 3
- Mech-Center에 있는 로봇 서비스 명칭
-
파라미터 설명: 이 파라미터는 로봇 서비스 명칭을 입력하는 데 사용되고 Mech-Center에서 연결된 로봇의 명칭과 동일해야 합니다.
기본값: 비어 있음.
가상 카메라를 사용하는 경우
가상 모드가 켜질 때 설정할 파라미터는 다음과 같습니다.
- 카메라 캘리브레이션 파라미터 그룹
-
조절 설명: *데이터 경로가 선택된 다음에 카메라 캘리브레이션 파라미터 그룹을 자동으로 입력합니다. 데이터 경로 아래에 여러 카메라 캘리브레이션 파라미터 그룹이 있는 경우 이 항목의 드롭다운 목록에서 사용하려는 것을 선택할 수 있습니다.
- 데이터 경로
-
파라미터 설명: 이 파라미터는 이미지, 내부 파라미터 및 외부 파라미터가 저장된 폴더를 선택하는 데 사용됩니다.
설정 방법: 오른쪽에 있는
 를 클릭하여 이미지, 내부 파라미터 및 외부 파라미터가 저장된 폴더를 선택합니다.
를 클릭하여 이미지, 내부 파라미터 및 외부 파라미터가 저장된 폴더를 선택합니다.
|
가상 모드에서 이미지 파일 명칭과 파일의 형식은 다음과 같은 요구사항을 준수해야 하며 컬러 맵과 뎁스 맵의 이미지 번호는 일대일로 일치해야 합니다.
카메라 설치 방식이 Eye-in-Hand인 경우 이미지 번호와 플랜지 포즈는 일대일로 일치해야 합니다. |
가상 카메라 도우미:
-
다음과 같은 경우에는 가상 카메라 도우미가 트리거되어 사용자가 이미지 데이터를 선택하는 데 도움을 줍니다.
-
데이터 경로에서 경로를 입력하지 않습니다.
-
선택한 데이터 폴더에 여러 세트의 데이터가 있습니다.
-
선택한 데이터 폴더에 컬러 맵 데이터, 뎁스 맵 데이터 또는 내부 및 외부 파라미터 데이터가 없습니다.
-
-
가상 카메라 도우미를 사용하는 경우 데이터를 읽는 단계는 다음과 같습니다.
-
가상 카메라 도우미에서
 를 클릭하여 데이터 경로를 선택합니다.
를 클릭하여 데이터 경로를 선택합니다.경로를 선택한 다음에 카메라 ID 및 파라미터 그룹을 자동으로 입력합니다.
-
검증을 클릭하여 카메라 파라미터 그룹이 업데이트되었습니다.라는 말이 나옵니다.
-
컬러 맵, 뎁스 맵, 플랜지 포즈 우측의
버튼을 차례로 클릭하여 컬러 맵, 뎁스 맵, 플랜지 포즈가 위치한 폴더를 선택합니다. 선택한 후 확인을 클릭합니다.
-
|
카메라 설치 방식이 Eye-in-Hand인 경우만 플랜지 포즈를 추가해야 합니다. |
-
마지막에 나오는 설정 완료 창에서 확인을 클릭합니다.
|
가상 모드에서 데이터 경로의 이미지 데이터가 변경되면 데이터 경로를 다시 선택해야 하며, 그렇지 않으면 변경된 이미지 데이터를 읽을 수 없습니다. |
- 재생 모드
-
파라미터 설명: 이 파라미터는 이미지의 읽는 순서를 지정하는 데 사용됩니다.
값 리스트
-
순차: 기본값. 폴더에 있는 이미지 순서대로 이미지를 읽습니다.
-
한 번 반복: 현재 이미지를 반복해서 읽습니다.
-
모두 반복: 폴더에 있는 이미지 순서대로 모든 이미지를 읽은 후 처음부터 읽습니다.
-
랜덤: 이미지를 랜덤으로 읽습니다.
조절 설명: 실제 수요에 따라 이미지 데이터를 읽는 모드를 선택하십시오.
-
- 현재 프레임
-
파라미터 설명: 이 파라미터는 현재 읽고 있는 이미지의 번호와 시간을 표시하는 데 사용됩니다.
- 이미지 명칭 유형
-
파라미터 설명: 이 파라미터는 컬러 맵 경로 출력 포트에서 출력된 이미지 명칭 유형을 선택하는 데 사용됩니다.
값 리스트: 완전한 경로, 파일 완전한 명칭, 파일 명칭.
기본값: 완전한 경로.
뎁스 배경 제거 설정
- 뎁스 맵으로 배경을 제거하기
-
파라미터 설명: 이 파라미터는 뎁스 맵의 배경 정보를 제거하는 데 사용됩니다.
기본 값: 선택하지 않음.
- 뎁스 맵 배경 이미지
-
파라미터 설명: 이 파라미터는 배경의 뎁스 맵을 캡처하거나 읽는 데 사용됩니다.
기본값: depth_background.png
설정 방법:
-
배경 뎁스 맵 파일 선택 버튼을 클릭하여 배경 설정 화면으로 들어갑니다.
-
로컬에 사용할 수 있는 배경 이미지가 있으면 2단계를 참조하십시오.
-
로컬에 사용할 수 있는 배경 이미지가 없으면 3단계를 참조하십시오.
-
-
···를 클릭하여 이미지를 선택하며 확인을 클릭하면 뎁스 맵 배경 이미지가 선택되었습니다.
-
배경 설정 화면 오른쪽에 있는 감지된 카메라에서 카메라를 선택하고
를 클릭하여 카메라와 연결합니다.카메라가 성공적으로 연결되면 왼쪽의 이미지 뷰어에서는 카메라에서 캡처된 뎁스 맵을 표시합니다.
-
뎁스 맵을 업데이트하려면 한번 캡처나 연속 캡처를 클릭하면 됩니다.
-
배경 이미지 파일 명칭을 변경하려면 배경 이미지에서 파일 명칭을 입력하면 됩니다.
-
확인을 클릭하면 뎁스 맵 배경 이미지가 선택되었습니다.
-
- 배경 뎁스의 변동
-
파라미터 설명: 이 파라미터는 물체에서 포인트의 뎁스와 배경 이미지의 뎁스를 비교하는 데 사용되며 단위는 밀리미터(mm)입니다. 포인트의 뎁스와 배경 이미지 뎁스의 값은 이 값보다 작을 때 포인트는 배경의 포인트로 간주되어 제거됩니다.
기본 값: 10mm
External2D
- 카메라 ID
-
파라미터 설명: 이 파라미터는 카메라와 연결하고 카메라 캘리브레이션 파라미터 그룹을 선택하는 데 사용됩니다.
설정 방법:
-
카메라 선택 버튼을 클릭하여 사용할 카메라 및 캘리브레이션 파라미터 그룹 선택 창을 엽니다.
-
연결할 카메라를 선택하여
를 클릭합니다.카메라가 성공적으로 연결되면
버튼이 가 됩니다. -
카메라가 성공적으로 연결된 후 파라미터 그룹을 선택하기 목록 상자에서 캘리브레이션 파라미터 그룹을 선택하여 확인을 클릭합니다.
캘리브레이션 파라미터 그룹을 선택한 다음에 카메라 ID, 카메라 캘리브레이션 파라미터 그룹, Ip 및 Port 파라미터를 자동으로 채워집니다.
-
- 카메라 캘리브레이션 파라미터 그룹
-
파라미터 설명: 이 파라미터는 카메라 캘리브레이션 파라미터 그룹을 지정하는 데 사용됩니다.
- IP
-
파라미터 설명: 이 파라미터는 카메라 IP 주소를 표시하므로 변경하지 마십시오.
- Port
-
파라미터 설명: 이 파라미터는 카메라 포트 번호를 읽는 데 사용됩니다.
|
IP 및 포트 번호는 읽기에만 사용됩니다. 이 두 파라미터를 변경하면 카메라 연결이 끊어질 수 있습니다. |
- 타임아웃
-
파라미터 설명: 이 파라미터는 카메라가 데이터를 수신한 후 클라이언트에 데이터를 전송할 때까지의 최대 응답 시간을 설정하는 데 사용하며 단위는 초(s)입니다. 다음과 같은 두 가지 경우가 있습니다.
-
카메라는 최대 시간에 성공적으로 연결하지 않습니다.
-
카메라는 최대 시간에 성공적으로 데이터를 캡처하지 않습니다.
기본값: 20s
-
- 카메라 재연결 횟수
-
파라미터 설명: 이 파라미터는 연결 시 오류가 발생한 경우, 카메라에 다시 연결할 수 있는 최대 횟수를 설정하는 데 사용합니다.
기본값: 3
- 자동 노출
-
파라미터 설명: 이 파라미터는 자동 노출 모델을 설정하는 데 사용됩니다.
기본값: 선택함
- 평균 그레이스케일 값
-
파라미터 설명: 이 파라미터는 이미지의 그레이스케일 기대값을 설정하는 데 사용됩니다. 이 값이 클수록 이미지가 밝아지고 작을수록 이미지가 어두워집니다.
기본값: 100
- 노출 시간
-
파라미터 설명: 이 파라미터는 이미지 휘도에 영향을 미칩니다. 이 값이 클수록 이미지가 밝아지고 작을수록 이미지가 어두워집니다.
기본값: 10
- 재캡처 횟수
-
파라미터 설명: 이 파라미터는 카메라 수집 시간 초과로 인해 카메라가 데이터 캡처에 실패한 경우 카메라가 데이터를 캡처하는 총 횟수를 지정하는 데 사용됩니다.
기본값: 3
권장값: 3
- Mech-Center에 있는 로봇 서비스 명칭
-
파라미터 설명: 이 파라미터는 로봇 서비스 명칭을 입력하는 데 사용되고 Mech-Center에서 연결된 로봇의 명칭과 동일해야 합니다.
기본값: 비어 있음.
LMI
- 카메라 ID
-
파라미터 설명: 이 파라미터는 카메라와 연결하고 카메라 캘리브레이션 파라미터 그룹을 선택하는 데 사용됩니다.
설정 방법:
-
카메라 선택 버튼을 클릭하여 사용할 카메라 및 캘리브레이션 파라미터 그룹 선택 창을 엽니다.
-
연결할 카메라를 선택하여
를 클릭합니다.카메라가 성공적으로 연결되면
버튼이 가 됩니다. -
카메라가 성공적으로 연결된 후 파라미터 그룹을 선택하기 목록 상자에서 캘리브레이션 파라미터 그룹을 선택하여 확인을 클릭합니다.
캘리브레이션 파라미터 그룹을 선택한 다음에 카메라 ID, 카메라 캘리브레이션 파라미터 그룹, Ip 및 Port 파라미터를 자동으로 채워집니다.
-
- 카메라 캘리브레이션 파라미터 그룹
-
파라미터 설명: 이 파라미터는 카메라 캘리브레이션 파라미터 그룹을 지정하는 데 사용됩니다.
- IP
-
파라미터 설명: 이 파라미터는 카메라 IP 주소를 표시하므로 변경하지 마십시오.
- 재캡처 횟수
-
파라미터 설명: 이 파라미터는 카메라 수집 시간 초과로 인해 카메라가 데이터 캡처에 실패한 경우 카메라가 데이터를 캡처하는 총 횟수를 지정하는 데 사용됩니다.
기본값: 3
권장값: 3
- Mech-Center에 있는 로봇 서비스 명칭
-
파라미터 설명: 이 파라미터는 로봇 서비스 명칭을 입력하는 데 사용되고 Mech-Center에서 연결된 로봇의 명칭과 동일해야 합니다.
기본값: 비어 있음.