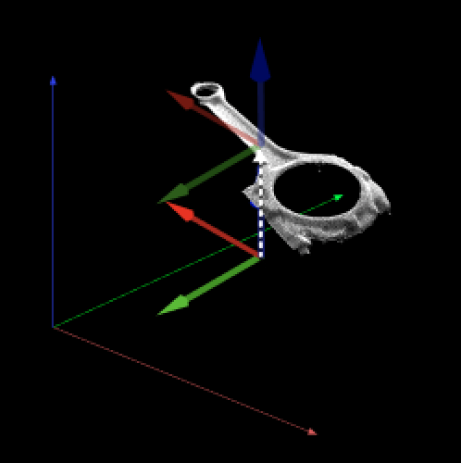
Z축을 따라 포즈를 포인트 클라우드 표면으로 이동
응용 시나리오
이 스텝은 일반적으로 물체 표면 위에 있지 않은 포즈를 조정하는 데 사용됩니다. 이러한 포즈는 대상 물체의 기울어짐 또는 표면의 오목함/볼록함 때문에 발생할 수 있습니다. 일반적으로 평면 포인트 클라우드의 포즈 및 치수 계산 스텝 뒤에 사용됩니다.
파라미터 설명
시각화 설정
| 파라미터 | 설명 | ||||
|---|---|---|---|---|---|
선택한 좌표계에서 포인트 클라우드를 표시하기 |
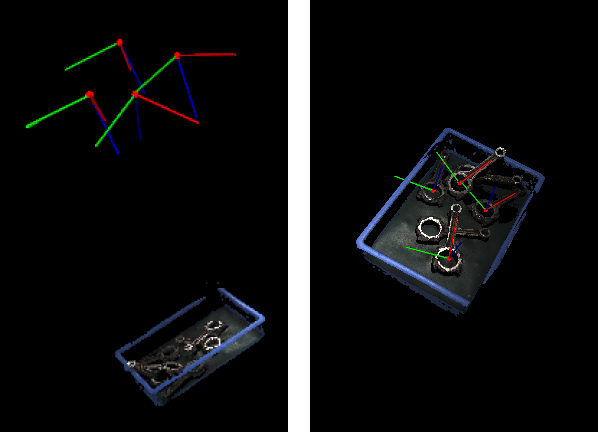
파라미터 설명: 로봇 또는 카메라 좌표계에서 포인트 클라우드를 표시합니다. 기본값: 로봇 좌표계 값 리스트: 로봇 좌표계, 카메라 좌표계 조정 설명: 카메라 좌표계를 선택할 때 디버그 출력 창에서 카메라 좌표계에서의 시각화 출력 결과를 표시합니다. 로봇 좌표계를 선택할 때 디버그 출력 창에서 로봇 좌표계에서의 시각화 출력 결과를 표시합니다. 특정 효과에 대한 내용은 조정 예시를 참조하십시오.
|
||||
포즈 시각화 설정 |
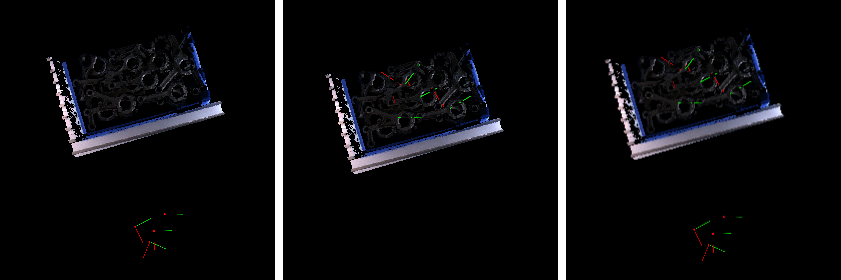
파라미터 설명: 이 파라미터는 포즈의 시각화 형식을 설정하는 데 사용됩니다. 기본값: 출력한 포즈만 표시하기 값 리스트: 입력한 포즈만 표시하기, 출력한 포즈만 표시하기, 입력 및 출력한 포즈를 모두 표시하기 조정 설명: 실제 필요에 따라 드롭다운 목록에서 적절한 포즈 표시 설정을 선택합니다. 특정 효과에 대한 내용은 조정 예시를 참조하십시오. |
포인트 클라우드 획득 설정
| 파라미터 | 설명 |
|---|---|
XOY 평면 반지름 |
파라미터 설명: XOY 평면에서 포즈 원점으로부터 탐색 범위 경계까지의 거리를 설정합니다. 단위는 밀리미터(mm)입니다. 기본값: 5.000 mm. 조절 설명: 반지름이 클수록 탐색 범위가 넓어져 더 많은 포인트 클라우드 데이터를 포함할 수 있습니다. 반지름이 작을수록 탐색 범위가 좁아지며 더 정확할 수 있지만 충분한 포인트 클라우드 데이터를 찾지 못할 수도 있습니다. |
조정 설정
| 파라미터 | 설명 |
|---|---|
조정 설정 |
파라미터 설명: 포즈의 Z축 이동 시 사용할 알고리즘 또는 정렬 모드를 설정합니다. 값 리스트:
조절 설명: 조정 설정이 다르면 "참조 Z축" 및 "선택한 Z값" 파라미터에서 사용 가능한 옵션이 달라집니다. |
참조 Z축 |
파라미터 설명: 거리 계산 시 참조할 좌표계를 선택합니다. 값 리스트:
조절 설명: 이 파라미터는 "조정 설정"이 활성화된 경우에만 사용 가능합니다. 참조 좌표계를 다르게 선택하면 포즈와 포인트 클라우드 간의 거리 계산 결과에 영향을 미칩니다. |