일반적인 응용 사례의 대상 물체 구성 방법
일반적인 경우, 다음 표를 참조하여 포인트 클라우드 모델을 만들고 대상 물체에 대한 픽 포인트를 추가합니다.
| 대상 물체 | 대상 물체의 특징 | 포인트 클라우드 모델을 만드는 방식 | 에지 포인트 클라우드 모델 | 표면 포인트 클라우드 모델 | 픽 포인트 생성 방법 | 픽 포인트 | 그리퍼 |
|---|---|---|---|---|---|---|---|
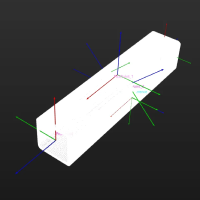
강철 빌릿(정사각형) |
규칙적인 기하학체 |
STL 파일 가져오기 |
|
|
픽 포인트 수동 드래그
|
|
|
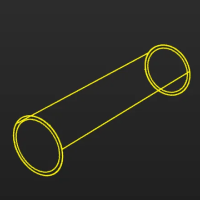
강철 빌릿(원형) |
규칙적인 기하학체 |
STL 파일을 가져오기 |
|
|
픽 포인트 수동 드래그
|
|
|
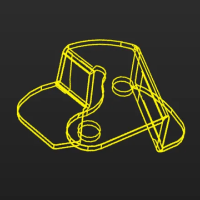
판금 부품 |
앞과 뒤를 구분해야 하는 얇은 부품 |
STL 파일을 가져오기 |
|
|
픽 포인트 수동 드래그
|
|
|
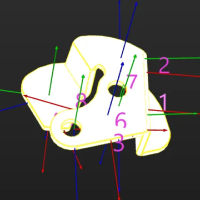
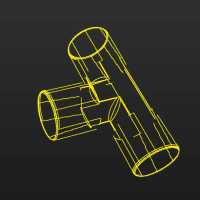
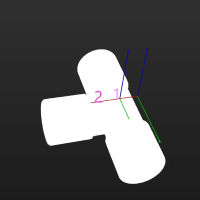
3WAY밸브 |
소형 부품 |
STL 파일을 가져오기 |
|
|
픽 포인트 수동 드래그
|
|
|
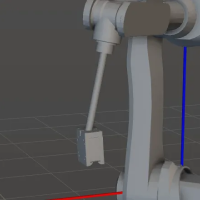
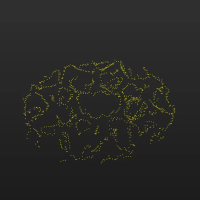
철제 샤프트 |
반사형 부품 |
카메라로 포인트 클라우드 획득 |
|
|
픽 포인트 수동 드래그 |
|
- |
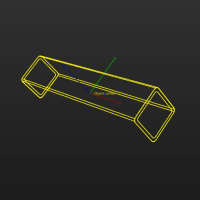
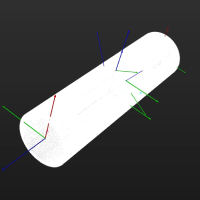
긴 물체 |
길고 커다란 물건 |
카메라로 포인트 클라우드 획득 |
|
|
픽 포인트 수동 드래그 |
|
|