캘리브레이션 보드
캘리브레이션 보드는 내부 파라미터 검사와 핸드-아이 캘리브레이션에 많이 사용됩니다. 이 부분에서는 주로 캘리브레이션 보드의 종류와 모델, 모델 선택 방법 및 설치 방법을 소개합니다.
|
캘리브레이션 보드의 설치 도면과 3D 모델이 필요하시면 여기를 클릭하여 다운로드하십시오. |
캘리브레이션 보드의 종류와 모델
Mech-Mind에서는 CGB와 OCB 이 두 가지 종류의 캘리브레이션 보드를 제공합니다.
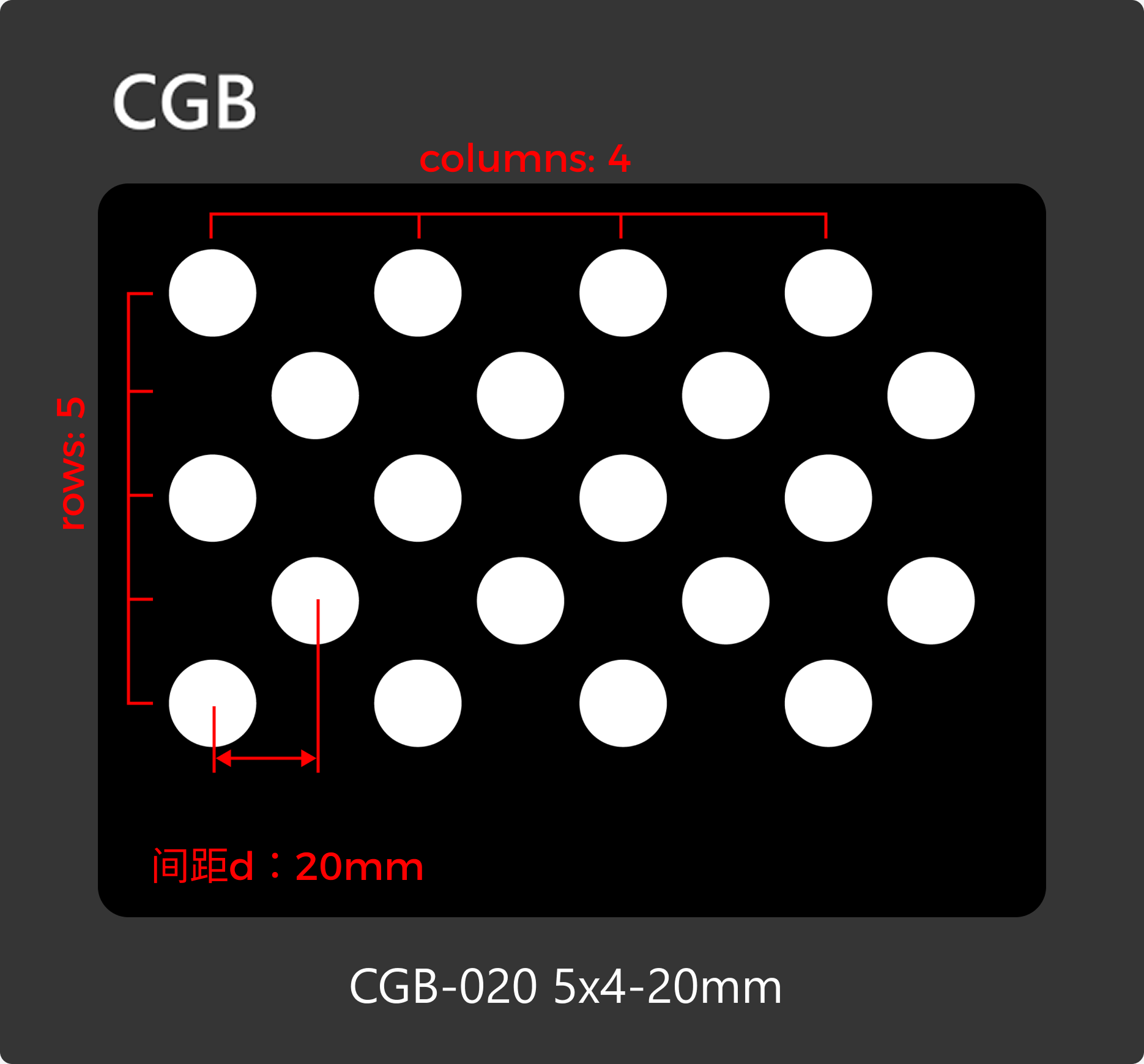
CGB
CGB 유형의 캘리브레이션 보드(예: CGB-020) 그림입니다.
|
| 모델 | 재질 | d (mm) | 행 | 열 | 치수(mm) |
|---|---|---|---|---|---|
CGB-020 |
탄소섬유 |
20 |
5 |
4 |
185 x 145 x 2 |
CGB-035 |
35 |
5 |
4 |
303 x 243 x 2 |
|
CGB-050 |
50 |
5 |
4 |
420 x 340 x 3 |
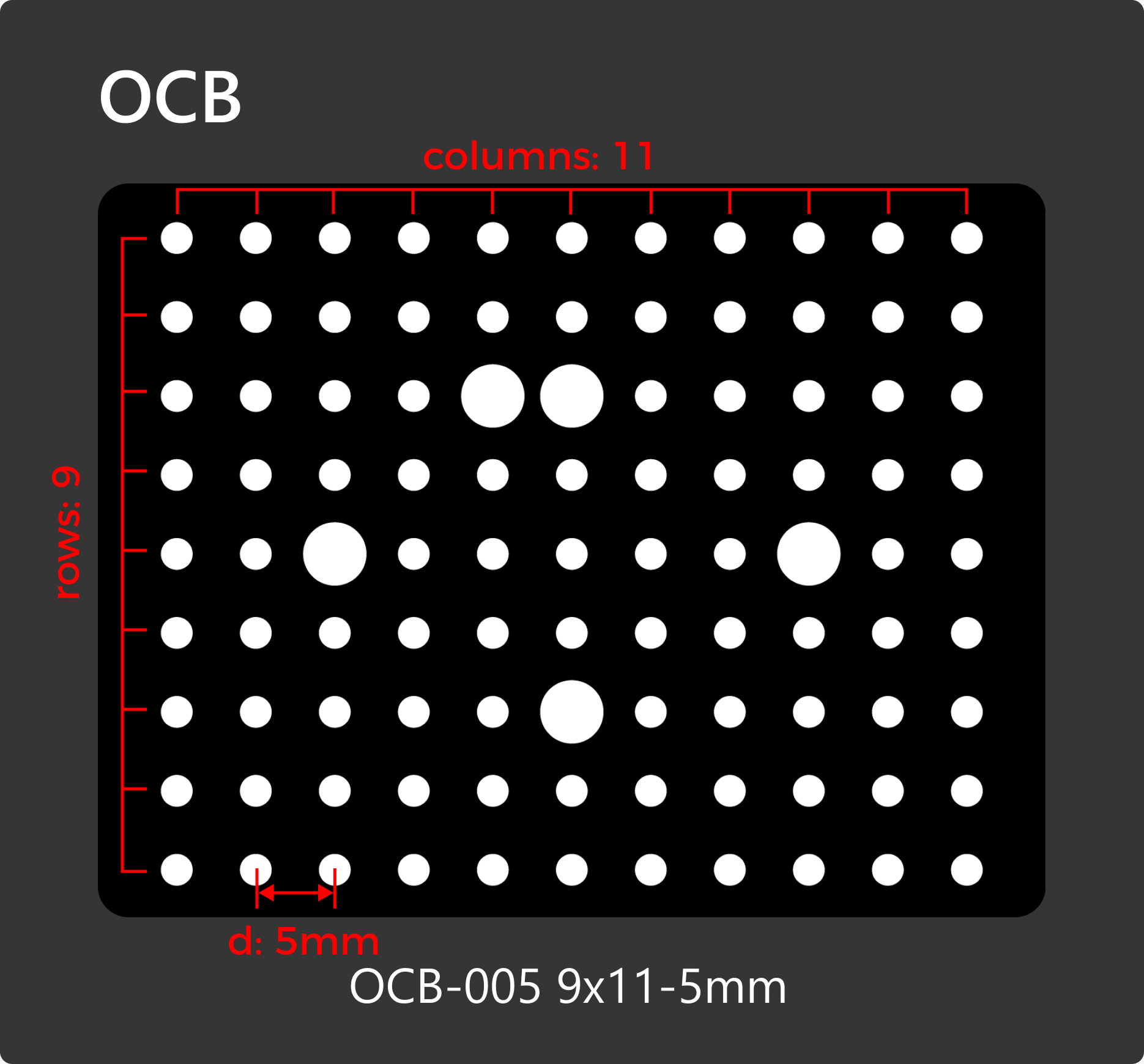
OCB
OCB 유형의 캘리브레이션 보드(예: OCB-005) 그림입니다.
|
| 모델 | 재질 | d (mm) | 행 | 열 | 치수(mm) |
|---|---|---|---|---|---|
OCB-005 |
유리 |
5 |
9 |
11 |
60 x 55 x 3 |
OCB-010 |
10 |
9 |
11 |
120 x 110 x 3 |
|
OCB-020 |
20 |
9 |
11 |
240 x 220 x 3 |
캘리브레이션 보드 모델 선택
3D 카메라 캘리브레이션
3D 카메라 캘리브레이션 시 적절한 크기의 캘리브레이션 보드를 선택하면 캘리브레이션의 정확도와 안정성을 높일 수 있습니다. 실제 프로젝트에서는 카메라 모델과 실제 작업 거리에 따라 적합한 캘리브레이션 보드를 선택하십시오.
카메라 시리얼 넘버를 해석하는 방법 내용을 참조하여 카메라 모델을 확인하십시오. 여전히 카메라 모델을 알 수 없는 경우 Mech-Mind 기술 지원팀에 문의하십시오.
| 모델 | 추천 작업 거리(mm) | 추천된 모델 |
|---|---|---|
UHP-140-GL |
300±20 |
OCB-005 |
NANO-GL |
300~600 |
CGB-020 |
NANO ULTRA-GL |
250~500 |
CGB-020 |
PRO S-GL |
500~800 |
CGB-020 |
800~1000 |
CGB-035 |
|
PRO M-GL |
1000~1500 |
CGB-035 |
1500~2000 |
CGB-050 |
|
LSR S-GL |
500~1000 |
CGB-035 |
1000~1500 |
CGB-050 |
|
LSR L-GL |
1200~3000 |
CGB-050 |
DEEP-GL |
1200~3500 |
CGB-050 |
PRO XS-GL |
300~600 |
CGB-020 |
Log S |
500~800 |
CGB-020 |
800~1000 |
CGB-035 |
|
Log M |
1000~1500 |
CGB-035 |
1500~2000 |
CGB-050 |
|
Laser L Enhanced |
1500~3000 |
CGB-050 |
2D 카메라 캘리브레이션
2D 카메라 캘리브레이션 시 적절한 크기의 캘리브레이션 보드를 선택하면 캘리브레이션의 정확도와 안정성을 높일 수 있습니다. 실제 프로젝트에서는 2D 카메라의 캘리브레이션 작업과 카메라 시야에 따라 적합한 캘리브레이션 보드를 선택하십시오. 여전히 카메라 모델을 알 수 없는 경우 Mech-Mind 기술 지원팀에 문의하십시오.
-
2D 카메라 캘리브레이션 작업 유형을 확인하십시오.
실제 요구 사항에 따라 캘리브레이션 작업 유형이 왜곡 캘리브레이션인지 핸드-아이 캘리브레이션인지 확인하십시오.
-
캘리브레이션 보드 치수를 추정하십시오.
목표 작업 거리에서 이미지를 획득하고, 다음 요구 사항에 따라 캘리브레이션 보드 치수를 추정한 후 적합한 캘리브레이션 보드 모델을 선택하십시오.
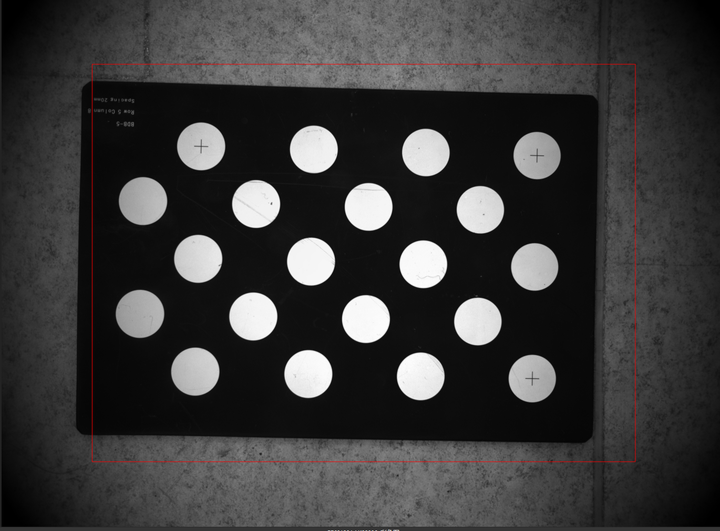
캘리브레이션 유형 설명 그림 왜곡 캘리브레이션
왜곡 파라미터를 안정적으로 계산할 수 있도록 캘리브레이션 보드가 카메라 시야를 최대한 많이 덮는 것이 좋습니다.
캘리브레이션 보드가 시야에 완전히 들어오지 않는 경우, 더 작은 캘리브레이션 보드를 우선적으로 사용하십시오.
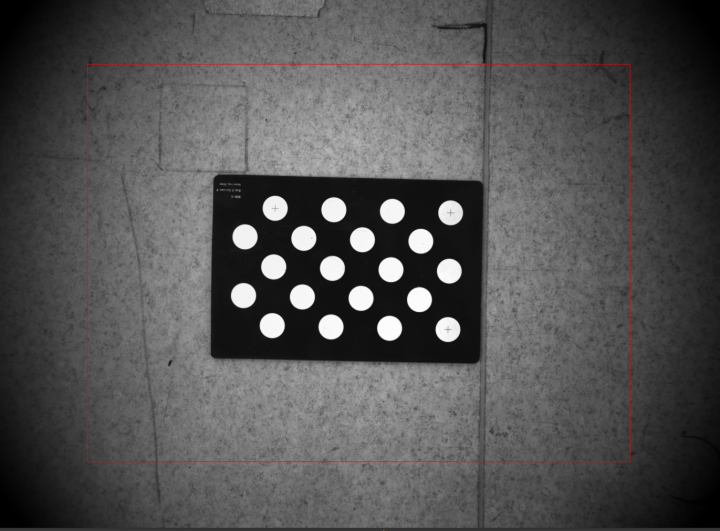
핸드-아이 캘리브레이션
OCB-005 모델의 캘리브레이션 보드를 사용하는 것을 권장합니다.
캘리브레이션 보드가 이미지에서 차지하는 비율은 시야의 1/9 이하(약 8%~15%)가 되도록 하여 특징점을 안정적으로 인식할 수 있게 하는 것이 좋습니다.
캘리브레이션 보드가 너무 작아 특징점이 부족한 경우, 더 큰 캘리브레이션 보드를 사용하십시오.
|
캘리브레이션 보드 설치
다음과 같은 캘리브레이션 시나리오에는 캘리브레이션 보드를 로봇 말단에 설치할 수 있습니다.
-
Eye to Hand(ETH) 방식으로 카메라 설치할 때의 자동 캘리브레이션 시나리오
-
Eye to Hand(ETH) 방식으로 카메라 설치할 때의 수동 캘리브레이션(여러 무작위 캘리브레이션 보드 포즈)
| 기타 핸드-아이 캘리브레이션 시나리오 및 내부 파라미터 검사에서는 캘리브레이션 보드를 장착할 필요가 없으며 캘리브레이션 보드를 물체 평면 중앙 위치에 배치하십시오. |
캘리브레이션 보드를 로봇 말단에 설치하는 방법은 다음과 같이 두 가지가 있습니다.
| 직접 설치 | 로봇 플랜지를 사용하여 설치 |
|---|---|
|
|

|
로봇 플랜지를 사용하여 캘리브레이션 보드를 설치하는 경우, Mech-Mind에서 제공하는 적절한 모델의 로봇 플랜지를 구매해야 합니다. 세부 정보는 로봇 및 로봇 플랜지 선택 내용을 참조하십시오. |