3D 근사 매칭 V2
응용 시나리오
이 스텝은 일반적으로 처음으로 시나리오 포인트 클라우드에서 대상 물체를 찾고 초기 후보 포즈를 얻는 데 사용됩니다. 이 스텝은 일반적으로 3D 상세 매칭 프로시저와 함께 사용됩니다.
파라미터 설명
| 파라미터 | 설명 |
|---|---|
파라미터 조정 레벨 |
설명: 이 파라미터는 이 스텝의 파라미터 디버그 레벨을 선택하는 데 사용됩니다.
|
Basic 파라미터 디버그 레벨
모델 설정
| 파라미터 | 설명 |
|---|---|
대상 물체 선택 |
파라미터 설명:이 파라미터는 대상 물체 편집기에서 구성이 완료된 대상 물체를 선택하는 데 사용됩니다.
|
매칭 모드
| 파라미터 | 설명 |
|---|---|
매칭 모드 |
설명: 이 파라미터는 3D 근사 매칭의 매칭 모드를 선택하는 데 사용됩니다.
|
사전 처리 설정
| 파라미터 | 설명 |
|---|---|
예상 포인트 수 자동 계산 |
설명: 이 파라미터는 다운 샘플링된 포인트 클라우드의 포인트 개수를 자동으로 계산할지 여부를 결정하는 데 사용됩니다. 이 파라미터를 체크하면 다운 샘플링된 포인트 클라우드의 포인트 수가 자동으로 계산됩니다. 이 파라미터를 언체크하면 "샘플링 후 모델 포인트 수의 목표값"을 수동으로 설정해야 합니다.
|
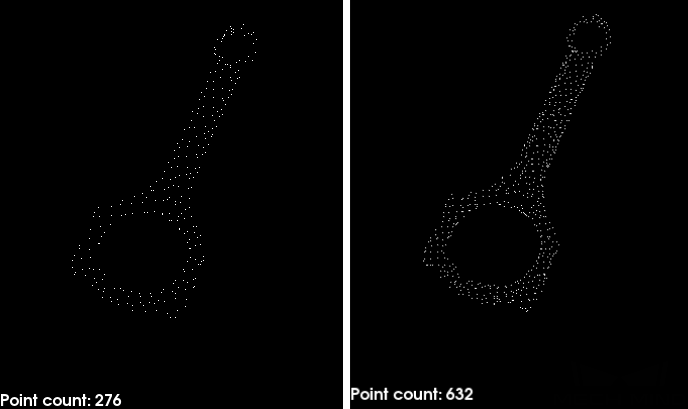
샘플링 후 모델의 희망 포인트 수 |
설명: 이 파라미터는 다운 샘플링 후 포인트 클라우드의 희망 포인트 수를 설정하는 데 사용됩니다. 이 값이 작을수록 다운 샘플링 후 포인트 클라우드의 포인트 수가 적어지고 매칭 정확도가 낮아집니다.
|
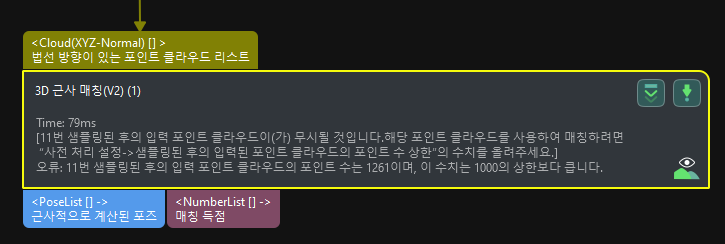
샘플링 후 입력한 포인트 클라우드 포인트의 상한 역치 |
설명: 이 파라미터는 다운 샘플링 후 시나리오 포인트 클라우드의 최대 희망 포인트 수를 설정하는 데 사용됩니다. 다운 샘플링 후 시나리오 포인트 클라우드의 포인트 수가 이 값보다 크면 다음 그림과 같이 이 시나리오 포인트 클라우드가 무시되고 빈 데이터가 출력됩니다.
|
포즈 검증 설정
| 파라미터 | 설명 |
|---|---|
단일 입력한 포인트 클라우드 결과의 예상 수 |
설명: 이 파라미터는 각 입력한 포인트 클라우드에 대해 예상되는 매칭 포즈의 수를 나타냅니다.
|
Advanced 파라미터 디버그 레벨
모델 설정
| 파라미터 | 설명 |
|---|---|
대상 물체 선택 |
설명: 이 파라미터는 대상 물체 편집기(프로젝트 폴더/resource/3d_matching)에서 포인트 클라우드 모델 파일을 선택하는 데 사용됩니다.
|
매칭 모드
| 파라미터 | 설명 |
|---|---|
매칭 모드 |
설명: 이 파라미터는 3D 근사 매칭의 매칭 모드를 선택하는 데 사용됩니다.
|
사전 처리 설정
| 파라미터 | 설명 |
|---|---|
예상 포인트 수 자동 계산 |
설명: 이 파라미터는 다운 샘플링된 포인트 클라우드의 포인트 개수를 자동으로 계산할지 여부를 결정하는 데 사용됩니다. 이 파라미터를 체크하면 다운 샘플링된 포인트 클라우드의 포인트 수가 자동으로 계산됩니다. 이 파라미터를 언체크하면 "샘플링 후 모델 포인트 수의 목표값"을 수동으로 설정해야 합니다.
|
샘플링 후 모델의 희망 포인트 수 |
설명: 이 파라미터는 다운 샘플링 후 포인트 클라우드의 희망 포인트 수를 설정하는 데 사용됩니다. 이 값이 작을수록 다운 샘플링 후 포인트 클라우드의 포인트 수가 적어지고 매칭 정확도가 낮아집니다.
|
샘플링 후 입력한 포인트 클라우드 포인트의 상한 역치 |
설명: 이 파라미터는 다운 샘플링 후 시나리오 포인트 클라우드의 최대 희망 포인트 수를 설정하는 데 사용됩니다. 다운 샘플링 후 시나리오 포인트 클라우드의 포인트 수가 이 값보다 크면 다음 그림과 같이 이 시나리오 포인트 클라우드가 무시되고 빈 데이터가 출력됩니다.
|
인접 포인트 수량 |
설명: 이 파라미터는 포인트 방향의 인접 포인트 수를 설정하는 데 사용됩니다.
|
투표 설정
| 파라미터 | 설명 |
|---|---|
단일 특징에 최대 점쌍이 포함 |
설명: 이 파라미터는 모델 분석에서 각 기능에 포함된 점쌍의 최대 수를 나타냅니다. 값이 작을수록 실행 속도는 빨라지지만 정확도는 낮아집니다.
|
거리 양자화 |
설명: 이 파라미터는 포인트 사이의 거리를 양자화하는 데 사용됩니다. 거리 간격 = 거리 양자화 × 샘플링 간격 , 값이 클수록 거리 간격이 커지고 매칭 정확도가 낮아집니다.
|
각도 양자화 |
설명: 이 파라미터는 포인트의 특징 법선 벡터 사이의 각도를 양자화하는 데 사용됩니다. 각도 간격 = 360° / 각도 양자화 , 값이 클수록 각도 간격이 작고 매칭 정확도가 높아지지만 더 높은 품질의 포인트 클라우드가 필요합니다.
|
투표 비율 하한 역치 |
설명: 투표에서 “가장 높은 점수 × 투표 비율의 하한 역치” 보다 높은 점수의 포즈가 포즈 검증에 사용됩니다. 값이 낮을수록 포즈 검증에 더 많은 포즈가 사용되므로 정확한 매칭 결과를 찾을 수 있는 가능성이 높아지지만 실행 시간은 더 길어집니다.
|
기준점 샘플링 보폭 |
설명: 이 파라미터는 기준점의 샘플링 보폭을 조절하는 데 사용됩니다. 포인트 클라우드에서 이 보폭을 간격으로 샘플링합니다. 이 값이 클수록 샘플링 포인트가 적어지고 실행 속도가 빨라지지만 매칭 정확도가 떨어집니다.
|
비교점 샘플링 보폭 |
설명: 이 파라미터는 비교점의 샘플링 보폭을 조절하는 데 사용됩니다. 포인트 클라우드에서 이 보폭을 간격으로 샘플링합니다. 이 값이 클수록 샘플링 포인트가 적어지고 실행 속도가 빨라지지만 매칭 정확도가 떨어집니다.
|
기준점과 비교점은 한 쌍을 이루며, 샘플링 간격이 클수록 기준점과 비교점이 적어지고 점쌍이 적을수록 실행 속도가 빨라집니다. |
포즈 필터링 설정
| 파라미터 | 설명 |
|---|---|
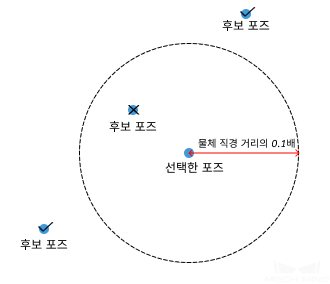
포즈 거리 기반 비최대 억제 사용 |
설명: 이 파라미터가 활성화되면 선택한 포즈로부터의 거리가 물체 직경의 0.1배 미만인 후보 포즈가 필터링됩니다.
|
모델 회전 각도로 포즈 필터링 |
설명: 에지 매칭 모드에서 모델 포인트 클라우드가 시나리오 포인트 클라우드와 매칭할 때 모델 회전 각도에 따라 포즈가 필터링됩니다. 모델 뒤집기 각도가 "각도 차 상한 역치"를 초과하면 포즈가 필터링됩니다.
|
각도 차 상한 역치 |
설명: "모델 회전 각도에 따라 포즈 필터링"의 파라미터 설명을 참조하십시오.
|
포즈 검증 설정
| 파라미터 | 설명 |
|---|---|
단일 입력한 포인트 클라우드 결과의 예상 수 |
설명: 이 파라미터는 각 입력한 포인트 클라우드에 대해 예상되는 매칭 포즈의 수를 나타냅니다.
|
복셀 길이 생성 전략 |
설명: 이 파라미터는 복셀 길이를 생성하기 위한 전략을 선택하는 데 사용됩니다.
|
복셀 길이 하한 |
설명: 이 파라미터는 복셀 길이의 하한을 설정하는 데 사용되며 단위는 밀리미터(mm)입니다.
|
복셀 길이 상한 |
설명: 이 파라미터는 복셀 길이의 상한을 설정하는 데 사용되며 단위는 밀리미터(mm)입니다.
|
|
포인트 클라우드가 위치한 공간은 3D 그리드로 나뉘며, 복셀 길이는 3D 그리드의 가장 작은 단위의 크기입니다. |
결과 시각화
| 파라미터 | 설명 |
|---|---|
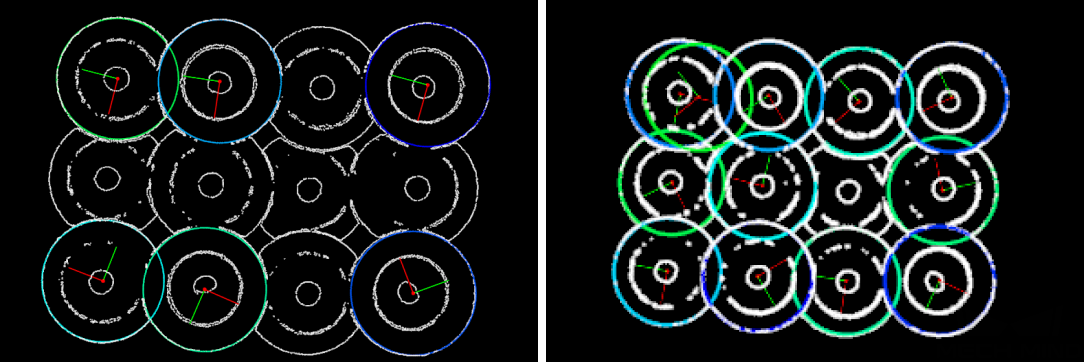
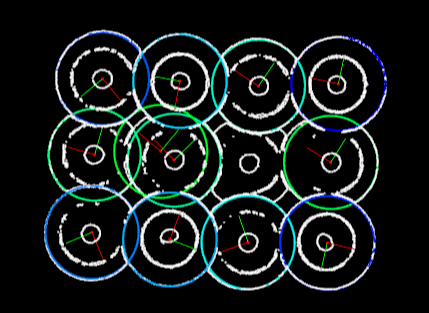
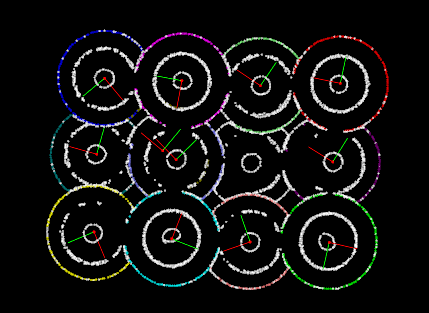
시각화 옵션 |
설명: 이 파라미터는 시각화할 내용을 선택하는 데 사용됩니다.
|