DI 확인
| 1.8.0 버전부터 “DI 체크” 및 “DI 리스트 체크” 스텝을 새로운 “DI 체크” 스텝으로 병합했습니다. |
| 이 스텝은 마스터 컨트롤 통신 방식에서만 사용될 수 있습니다. |
기능 설명
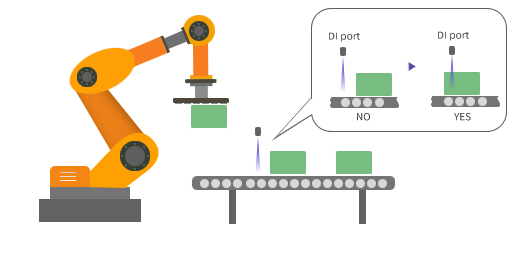
로봇 산업에서 “DI”는 일반적으로 디지털 입력을 나타냅니다. DI는 일반적으로 외부 장치나 센서의 상태를 확인하고 모니터링하는 데 사용됩니다.
이 스텝을 통해 특정 DI 포트의 신호를 읽어내어 DI 신호에 따라 다른 작업 흐름을 수행할 수 있습니다.
응용 시나리오
-
디팔레타이징 시나리오에서 상자 낙하 여부를 감지합니다.
-
디팔레타이징 시나리오에서 진공 그리퍼가 상자에 단단히 부착되었는지 감지합니다.
-
특정 DI 포트의 신호를 감지합니다.
파라미터 설명
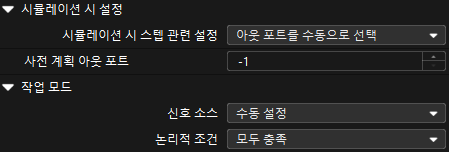
시뮬레이션 시 스텝 관련 설정
이 파라미터는 프로젝트 시뮬레이션 시 스텝의 관련 설정을 선택하는 데 사용됩니다.
-
외부 입력 확인
시뮬레이션 프로젝트가 이 스텝까지 실행되면 외부 입력을 확인하고 DI를 기반으로 해당 아웃 포트를 선택합니다.
-
특정 아웃 포트를 따라 실행
특정 아웃 포트를 지정하면 시뮬레이션 프로젝트가 해당 아웃 포트 이후에 분기를 실행합니다.
-
아웃 포트를 수동으로 선택
시뮬레이션 프로젝트가 이 스텝으로 실행되면 아웃 포트를 수동으로 선택할 수 있는 창이 나타납니다. 아웃 포트를 선택되면 프로젝트 실행이 계속됩니다.
아래 예시를 참조할 수 있습니다.
“아웃 포트 선택” 드롭다운 메뉴에서 아웃 포트를 선택한 다음 확인 버튼을 클릭하면 프로젝트는 계속해서 스텝을 실행합니다.
취소 또는 X 버튼을 클릭하면 시뮬레이션 과정이 종료됩니다.
사전 계획 아웃 포트
| 계획: 소프트웨어가 로봇이 목표 위치에 도달하기 위해 따를 수 있는 충돌 없는 경로를 찾으려고 시도하는 프로세스를 의미합니다. |
계획을 방해할 수 있는 스텝의 경우 소프트웨어는 계획 중에 해당 스텝의 실제 아웃 포트를 예측할 수 없습니다. 이런 경우 소프트웨어가 이 스텝의 실행 가능성을 종합적으로 계획할 수 있도록 사전 계획을 위해 아웃 포트를 미리 지정할 수 있습니다.
"DI 체크" 스텝에서는 실제 DI 신호를 감지해야 해당 포트의 분기 프로세스를 수행할 수 있으므로 계획이 중단될 수 있습니다. 이 스텝 전후의 스텝을 연결하고 전체적으로 계획하고 로봇 동작을 보다 원활하게 만들기 위해 사전 계획의 아웃 포트를 지정하여 해당 포트의 후속 작업 흐름을 지정할 수 있습니다.
-
-1로 설정하면 해당 스텝은 현재 DI 신호를 정상적으로 감지하고 전체 계획을 중단할 것입니다.
-
0 또는 0보다 큰 정수로 설정되면 작업 흐름은 해당 아웃 포트를 사용하여 실행을 계속하고 현재 스텝 전후의 스텝과 함께 전체적으로 계획할 수 있습니다. 결과적으로 로봇의 전반적인 움직임은 훨씬 더 원활해질 것입니다.
또한, 실제 실행 시의 아웃 포트가 사전 계획 아웃 포트와 동일하지 않으면, 실제 아웃 포트를 사용하여 다시 계획합니다.
작업 모드
소스
“사용자 정의” 또는 “비전 이동”을 선택할 수 있습니다.
-
비전 이동
상자 디팔레타이징 시나리오에만 적용됩니다. 진공 그리퍼 바닥면의 상자로 덮인 영역에 따라 소프트웨어는 체크해야 할 DI 포트 번호를 자동으로 계산합니다.
-
사용자 정의
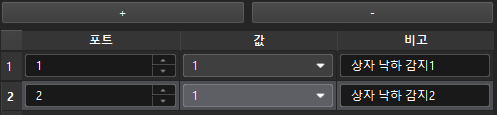
체크해야 할 DI 포트 번호와 신호 값을 수동으로 지정합니다. 구체적으로 다음과 같습니다.
-
실제로 체크해야 할 포트 수에 따라 +를 클릭하여 포트를 추가하고 구성합니다.
-
체크할 포트 번호와 값을 설정하고, 현재 포트의 기능에 대해 설명할 수 있습니다.
-
포트 번호는 중복될 수 없습니다. 중복된 포트 번호로는 구성할 수 없습니다.
-
각 포트의 기능을 명확히 하기 위해 각 포트에 대한 설명을 추가하는 것이 좋습니다.
-
포트를 선택한 후 - 버튼을 클릭하면 해당 포트의 구성을 삭제할 수 있습니다.
-
-
예시
-
“소스”를 “비전 이동”으로 설정한 경우입니다. “디팔레타이징 진공 그리퍼 구성기”에서 DI 포트와 신호 값을 구성했습니다.
파라미터 설정
설명
하나 또는 하나 이상 충족 + 한번
하나의 신호가 조건을 충족하는 경우 작업 흐름은 "하나 또는 하나 이상 충족" 아웃 포트를 통해 계속 진행됩니다. 조건을 충족하는 신호가 없으면 작업 흐름은 "모두 불충족" 아웃 포트를 통해 계속 진행됩니다.
하나 또는 하나 이상 충족 + 지속적
제한 시간 초과가 발생하기 전에 지속적으로 체크합니다. 하나의 신호가 조건을 충족하는 경우 작업 흐름은 "하나 또는 하나 이상 충족" 아웃 포트를 통해 계속 진행됩니다. 시간 초과가 발생하면 작업 흐름은 "타임아웃" 아웃 포트를 통해 계속 진행됩니다.
모두 충족 + 한 번
모든 신호가 조건을 충족하는 경우에만 작업 흐름은 "모두 충족" 아웃 포트를 통해 계속 진행되고, 그렇지 않으면 "하나 또는 하나 이상 불충족" 아웃 포트를 통해 계속 진행됩니다.
모두 충족 + 지속적
제한 시간 초과가 발생하기 전에 지속적으로 체크합니다. 모든 신호가 조건을 충족하는 경우에만 작업 흐름은 "모두 충족" 아웃 포트를 통해 계속 진행됩니다. 제한 시간 초과가 발생하면 작업 흐름은 "타임아웃" 아웃 포트를 통해 계속 진행됩니다.
-
“소스”를 “사용자 정의”로 설정한 경우입니다. 설명을 위해 DI1, DI2, DI3 총 3개의 포트를 추가하는 것을 예로 들어 보겠습니다.
파라미터 설정
설명
하나 또는 하나 이상 충족 + 한번
하나의 신호가 조건을 충족하는 경우 작업 흐름은 대응한 아웃 포트를 통해 계속 진행됩니다. 조건을 충족하는 신호가 없으면 작업 흐름은 "모두 불충족" 아웃 포트를 통해 계속 진행됩니다.
하나 또는 하나 이상 충족 + 지속적
제한 시간 초과가 발생하기 전에 지속적으로 체크합니다. 하나의 신호가 조건을 충족하는 경우 작업 흐름은 대응한 아웃 포트를 통해 계속 진행됩니다. 시간 초과가 발생하면 작업 흐름은 "타임아웃" 아웃 포트를 통해 계속 진행됩니다.
모두 충족 + 한 번
모든 신호가 조건을 충족하는 경우에만 작업 흐름은 "모두 충족" 아웃 포트를 통해 계속 진행되고, 그렇지 않으면 "하나 또는 하나 이상 불충족" 아웃 포트를 통해 계속 진행됩니다.
모두 충족 + 지속적
제한 시간 초과가 발생하기 전에 지속적으로 체크합니다. 모든 신호가 조건을 충족하는 경우에만 작업 흐름은 "모두 충족" 아웃 포트를 통해 계속 진행됩니다. 제한 시간 초과가 발생하면 작업 흐름은 "타임아웃" 아웃 포트를 통해 계속 진행됩니다.