로봇 반복 정확도 검사
이 부분에서는 로봇 반복 정확도 검사를 수행하는 방법을 설명합니다.
EIH 설정에서 이미지 캡처 위치를 확인
이 기능은 EIH 시나리오에서 이미지-캡처 위치에서 로봇 반복성을 확인하는 데 사용됩니다. 피킹 과정에서 이미지-캡처 위치에서의 반복성이 좋지 않으면 외부 파라미터 정확도가 좋지 않습니다.
캘리브레이션 보드 포즈를 얻기 위한 프로젝트를 구축
-
“카메라에서 이미지를 캡처하기” 스텝을 추가하기.
새 프로젝트를 만들고 “카메라에서 이미지를 캡처하기” 스텝을 추가하거나 이미 열린 프로젝트의 스텝을 선택하십시오. 그런 다음 스텝 파라미터 패널에서 카메라 선택 버튼을 클릭하여 카메라를 선택하고 연결합니다.
-
“캘리브레이션 보드 포즈 계산 및 카메라 내부 파라미터 검사” 스텝을 추가하기.
“캘리브레이션 보드 포즈 계산 및 카메라 내부 파라미터 검사” 스텝을 추가하고 “카메라에서 이미지를 캡처하기” 스텝과 연결합니다.
-
“출력” 스텝을 추가하기.
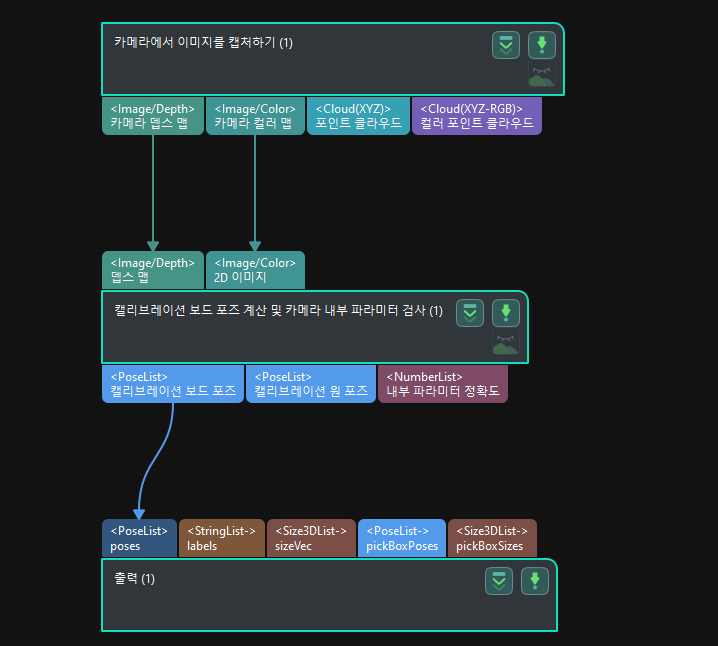
"출력" 스텝을 추가하고, "포트 유형" 파라미터에서 "사용자 정의"를 선택한 후, "출력 설정 도우미" 창에서 "poses" 통신 키를 선택합니다. 그 다음, "캘리브레이션 보드 포즈 계산 및 카메라 내부 파라미터 검사" 스텝을 "출력" 스텝과 연결하여 계산된 캘리브레이션 보드 포즈를 출력합니다.
프로젝트가 구축되면 아래 그림과 같습니다.
-
프로젝트를 실행하고 결과를 확인합니다.
프로젝트를 실행하고 하단의 로그 바에서 캘리브레이션 보드 포즈의 계산 결과를 확인합니다.
EIH(Eye-in-hand)를 통해 다양한 위치에서 캘리브레이션 보드의 이미지를 캡처하기
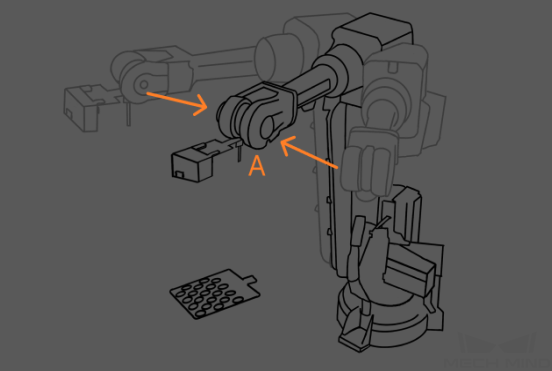
다양한 위치에서 캘리브레이션 보드의 이미지를 캡처하려면 로봇은 아래 그림과 같이 EIH(Eye-in-hand) 방식이어야 합니다.
-
첫 번째 사진을 찍을 때 로봇의 위치는 A 지점으로 기록되며, 이 지점에서 프로젝트가 실행되어 카메라 참조 좌표계에서 캘리브레이션 보드 포즈를 획득하고 기록합니다.
-
티치 펜던트를 사용하여 로봇 피킹 경로의 이미지 캡처 지점 옆에 있는 다른 위치로 로봇을 이동합니다. 또한 이동에 변환과 회전을 모두 포함하는 것이 좋습니다.
-
티치 펜던트를 사용하여 로봇을 A 지점으로 이동합니다. 그런 다음 캘리브레이션 보드 포즈를 얻어 기록합니다.
-
더 많은 캘리브레이션 보드 포즈를 얻고 기록하려면 2단계와 3단계를 반복합니다. 위 단계를 통해 얻은 포즈는 로봇의 반복성 정확도를 확인하는 데 사용됩니다.
ETH 설정에서 픽 포인트 확인
이 기능은 ETH 시나리오의 고정 픽 포인트에서 로봇 반복성 장확도를 확인하는 데 사용됩니다. ETH 시나리오에서 로봇은 다른 웨이 포인트에서 고정 된 픽 포인트에 도달해야 하며 로봇 반복성이 좋지 않으면 피킹 오차가 발생할 수 있습니다.
캘리브레이션 보드 포즈를 얻기 위한 프로젝트를 구축
-
“카메라에서 이미지를 캡처하기” 스텝을 추가하기.
새 프로젝트를 만들고 “카메라에서 이미지를 캡처하기” 스텝을 추가하거나 이미 열린 프로젝트의 스텝을 선택하십시오. 그런 다음 스텝 파라미터 패널에서 카메라 선택 버튼을 클릭하여 카메라를 선택하고 연결합니다.
-
“캘리브레이션 보드 포즈 계산 및 카메라 내부 파라미터 검사” 스텝을 추가하기.
“캘리브레이션 보드 포즈 계산 및 카메라 내부 파라미터 검사” 스텝을 추가하고 “카메라에서 이미지를 캡처하기” 스텝과 연결합니다.
-
“출력” 스텝을 추가하기.
"출력" 스텝을 추가하고 포트 유형 파라미터에서 "사전 정의(비전 결과)"를 선택한 다음 "캘리브레이션 보드 포즈 계산 및 카메라 내부 파라미터 검사" 스텝을 "출력" 스텝에 연결하여 계산된 캘리브레이션 보드 포즈를 출력하는 데 사용합니다.
프로젝트가 구축되면 아래 그림과 같습니다.
-
프로젝트를 실행하고 결과를 확인합니다.
프로젝트를 실행하고 하단의 로그 바에서 캘리브레이션 보드 포즈의 계산 결과를 확인합니다.
ETH(Eye-to-hand)를 통해 다양한 포즈에서 고정된 픽 포인트로 이동하기
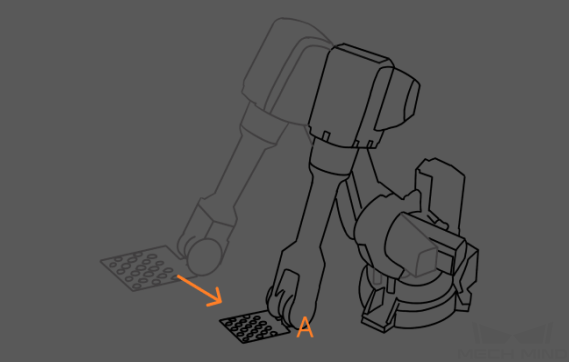
다양한 위치에서 고정된 픽 포인트에 도달할 때의 로봇의 정확도를 테스트하려면 로봇은 아래 그림과 같이 ETH(Eye-to-hand) 방식이어야 합니다.
-
로봇이 처음으로 피킹을 하는 위치를 A지점으로 기록하고, 그 지점에서 프로젝트를 실행합니다. 그런 다음 카메라 참조 좌표계에서 캘리브레이션 보드 포즈를 얻어 기록합니다.
-
티치 펜던트를 사용하여 로봇 피킹 경로의 이미지 캡처 지점 옆에 있는 다른 위치로 로봇을 이동합니다. 또한 이동에 변환과 회전을 모두 포함하는 것이 좋습니다.
-
티치 펜던트를 사용하여 로봇을 A 지점으로 이동합니다. 그런 다음 캘리브레이션 보드 포즈를 얻어 기록합니다.
-
더 많은 캘리브레이션 보드 포즈를 얻고 기록하려면 2단계와 3단계를 반복합니다. 위 단계를 통해 얻은 포즈는 로봇의 반복성 정확도를 확인하는 데 사용됩니다.