충돌 감지 구성
발생할 수 있는 충돌을 효과적으로 감지할 수 있습니다. 소프트웨어는 기본적으로 로봇, 말단장치, 시나리오 물체 사이의 충돌을 감지합니다. 포인트 클라우드와의 충돌 감지를 활성화하기를 클릭하면 입력된 포인트 클라우드와 말단장치 사이의 충돌을 감지할 수 있습니다.
-
툴 바에 있는 충돌 구성을 클릭하면 포인트 클라우드와의 충돌 감지를 활성화됩니다.
프로젝트에 허용되는 충돌 정도에 따라 다음 파라미터를 설정합니다.
-
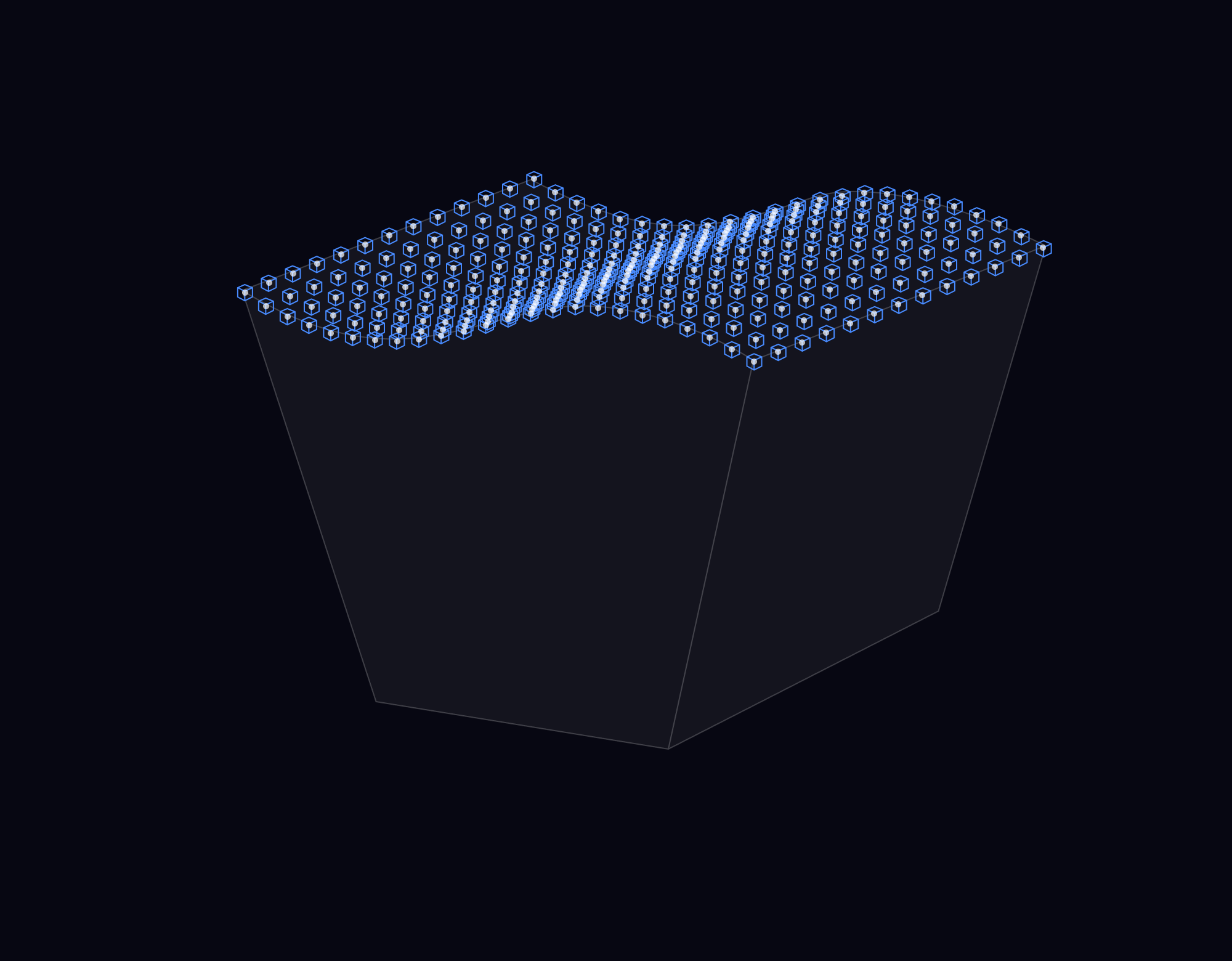
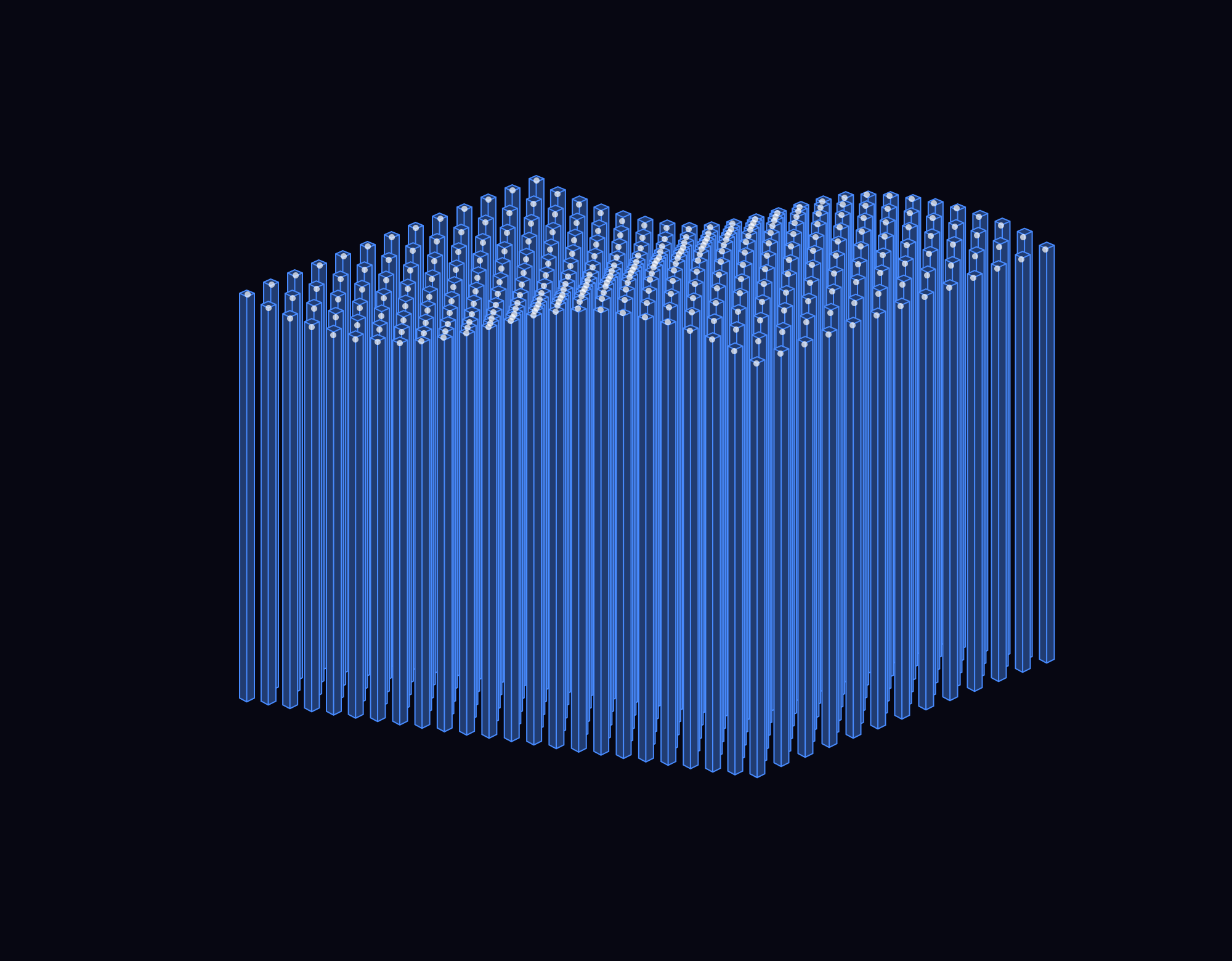
충돌 감지를 위한 포인트 클라우드 형태
포인트 클라우드 큐브 포인트 클라우드 컬럼 충돌 감지 계산을 위해 포인트 클라우드의 표면을 큐브로 채웁니다.
충돌 감지 계산을 위해 세계 좌표계의 Z축 음의 방향을 따라 컬럼을 사용하여 포인트 클라우드 아래 공간을 채웁니다. 세계 좌표계에서 포인트 클라우드 컬럼의 연장 길이는 컬럼 바닥면 위치를 구성하여 결정할 수 있습니다.
-
말단장치와 포인트 클라우드 사이의 충돌 부피의 상한
말단장치와 포인트 클라우드 사이의 충돌 부피가 설정된 역치보다 크면 충돌이 발생한 것으로 판단됩니다. 그렇지 않으면 충돌이 발생하지 않는 것으로 간주됩니다.
-
포인트 클라우드 충돌 기록
-
기록하기: 충돌이 발생한 포인트 클라우드의 위치와 수량이 계획 기록에 기록됩니다. 사용자가 계획 기록 내용을 볼 때 기록된 포인트 클라우드는 시뮬레이션 공간에 강조 표시됩니다. 하지만 기록하기를 선택하면 실행 효율성이 떨어질 수도 있습니다.
-
기록하지 않기: 충돌이 발생한 포인트 클라우드의 위치와 수량이 계획 기록에 기록되지 않고 나중에 확인될 수 없습니다. 하지만 포인트 클라우드 충돌을 기록할 때보다 프로젝트의 실행 효율성이 더 높습니다.
-
-
-
설정이 끝난 후 확인 버튼을 클릭합니다.