用户界面
文件页
启动 Mech-Viz 后进入文件页。
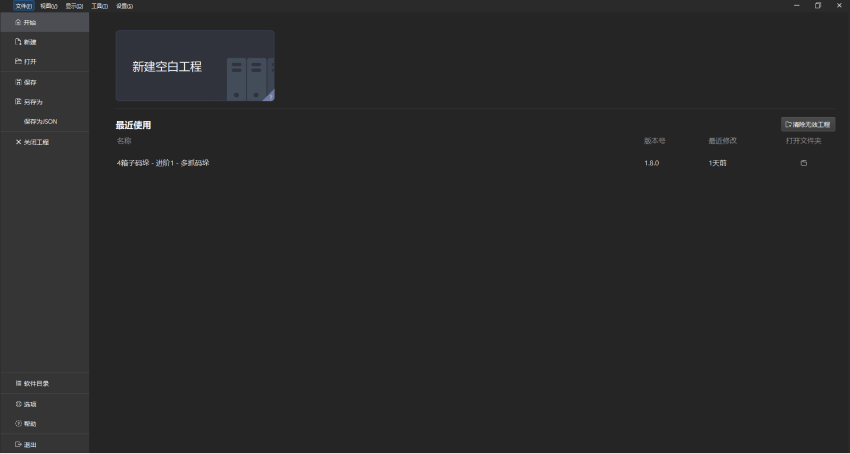
该界面包含以下部分:
选项 |
描述 |
快捷键 |
|
开始 |
创建一个新的空白工程。 |
Ctrl + N |
|
打开最近使用的工程 |
打开最近使用过的工程。 |
无 |
|
新建 |
创建一个新的空白工程。 |
Ctrl + N |
|
样例工程 |
软件内置的样例工程,使用方法请见样例工程。 |
无 |
|
打开 |
选择并打开已有的工程文件夹。 |
Ctrl + O |
|
保存 |
保存对当前工程的改动。 |
Ctrl + S |
|
另存为 |
将工程内容保存到指定位置。 |
Ctrl + Shift + S |
|
保存为JSON |
保存工程,并将工程文件夹中的 .viz 文件保存为 .json 文件。 |
无 |
|
导出到方案 |
将当前工程导出到方案。详细信息请参阅工程与方案。 |
无 |
|
关闭方案 |
关闭当前方案。 |
Ctrl + W |
|
软件目录 |
打开软件安装目录。 |
无 |
|
选项 |
打开选项设置窗口。 |
无 |
|
帮助 |
查看软件支持、版本信息、更新说明、用户手册。 |
无 |
|
退出 |
关闭 Mech-Viz。 |
Ctrl + Q |
|
|
主操作界面
创建空白工程后进入“机器人模型库”窗口,在此窗口中完成机器人模型选择后进入主操作界面。
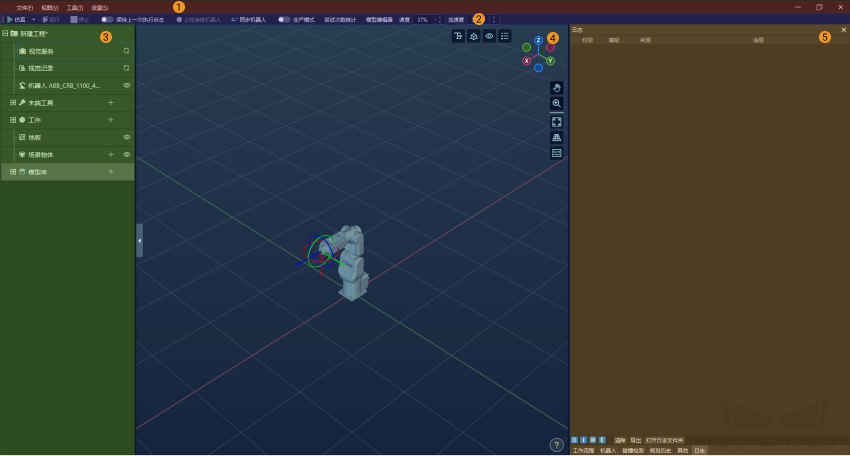
主界面分为五个主要部分:
1 |
菜单栏 |
详细信息请在对应链接中查阅。 |
2 |
工具栏 |
用于仿真工程,控制机器人运行,调节机器人运行速度等。 详细信息请参阅工具栏。 |
3 |
工程资源树 |
管理工程中使用的资源,包括末端工具、工件、场景物体等。 详细信息请参阅工程资源。 |
4 |
三维仿真空间 |
在工程运行或仿真过程中显示机器人的运行轨迹、碰撞检测结果、视觉位姿、点云等。 详细信息请参阅三维仿真空间 。 |
5 |
功能面板 |
包括工作流程、机器人、碰撞检测、规划历史、日志、抓取仿真和其他模块,全面覆盖了工程所需的核心配置功能。 详细信息请参阅功能面板。 |