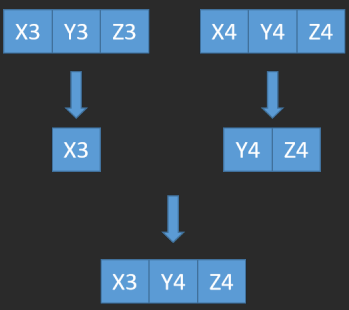
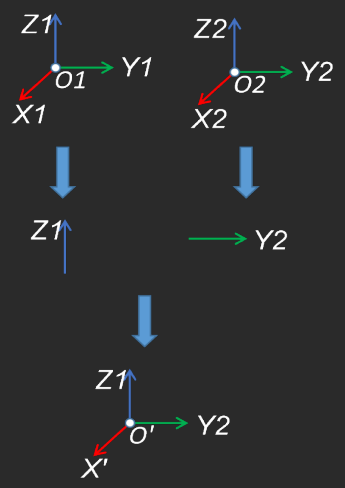
取每个输入位姿的一部分合成新的位姿
参数说明
可视化设置
| 参数 | 解释 | ||||
|---|---|---|---|---|---|
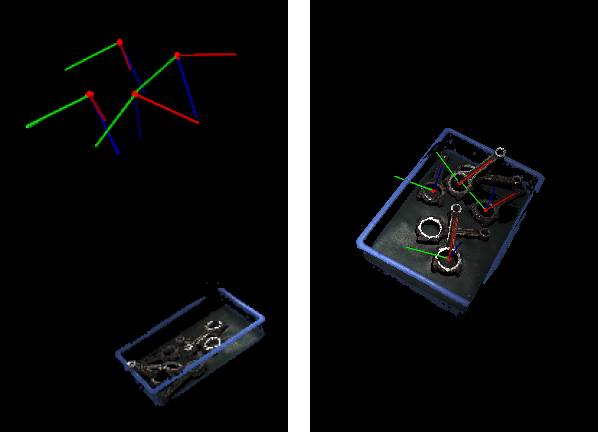
在选定坐标系下显示点云 |
参数解释:在机器人坐标系或相机坐标系下显示点云。 默认值:机器人坐标系 值列表:机器人坐标系、相机坐标系 调节说明:当选择相机坐标系时,调试输出窗口显示相机坐标系下的可视化输出结果;当选择机器人坐标系时,调试输出窗口显示机器人坐标系下的可视化输出结果。具体效果见 调节示例 。
|
||||
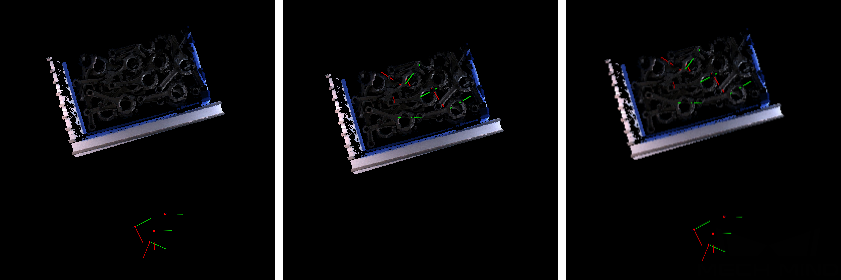
位姿显示设置 |
参数解释:该参数用于设置位姿的显示形式。 默认值:只显示输出位姿 值列表:只显示输出位姿、只显示输入位姿、输入与输出一同显示 调节说明:根据实际需求,在下拉列表中选择合适的位姿显示设置。具体效果见 调节示例 。 |
| 参数 | 解释 |
|---|---|
第四项输入的使用轴 |
参数解释:该参数用于指定第四项输入位姿使用的位置坐标轴,控制可配置位置输入对基础位置的影响范围。 默认值:X 值列表:X、Y、Z、XY、XZ、YZ、XYZ、None 调节说明:根据选择的值,可配置位置的对应坐标将覆写基础位置的相应坐标。例如选择参数值为 X, 则仅使用可配置位置的 X 坐标覆写基础位置的 X 坐标,Y 和 Z 坐标保持不变。如果选择 None,则完全忽略可配置位置的输入,仅使用基础位置的坐标。 |