消息分支
功能描述
该步骤用于等待外部指令,并根据指令执行不同的分支流程。
| 消息分支的缓存是一个队列。例如,当消息分支接收到0但尚未执行该指令时,然后又接收到1。那么,当消息分支被执行时,它会先处理0,然后下一次执行时会处理1。此外,在运行结束时,消息分支中的所有缓存指令都将被清空。 |
参数说明
仿真行为
仿真时步骤行为参数用于设置仿真工程时步骤的行为。
-
检查外部输入信号
仿真工程运行到此步骤时,对真实外部输入信号进行检查,并根据信号选择相应的出口。
-
走固定出口
指定一个固定的出口,仿真工程过程中执行该出口后的分支流程。
-
手动选择出口
仿真工程运行到此步骤时,弹出窗口以手动选择出口,选定后工程继续运行。
以下图所示为例:
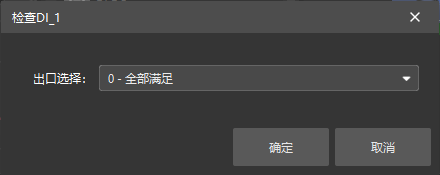
在“出口选择”下拉栏中选择出口后,单击确定后工程继续运行。
单击取消或X,仿真将停止。
出口数
该参数用于指定此步骤的出口数。
-
当需要打断工程运行,等待外部指令后继续运行时,设置出口数=1。此时消息分支接收到外部指令后,才继续执行后续的流程。
-
当需要根据外部指令运行相应的分支流程时,可设置出口数>1。请根据实际需要使用的分支数设置出口数。
参数显示根据出口数的变化而有所不同。请分别查看以下两小节内容,以获取详细信息。

出口数 > 1
当设置出口数 > 1 时,可设置以下参数。
一般用于根据外部指令运行相应的分支流程。
| 出口个数将大于5时,多个出口会合并显示。按住Ctrl键并双击步骤块可展开显示所有出口。各出口号和连接的步骤会在参数编辑区下方的表格内显示。 |
应用示例
标准接口通信中,使用消息分支调用不同的视觉工程。

以TCP/IP指令为例,若消息分支步骤编号为 1 ,那么当发送 203, 1, 1 指令时,将执行出口0后的分支流程;203, 1, 2 指令将执行出口1后的分支流程;依此类推。
| 标准接口指令详解请参考 203 指令——选择 Mech-Viz 分支(TCP/IP) 。 |