视觉系统介绍
什么是梅卡曼德视觉系统?
梅卡曼德视觉系统是梅卡曼德为汽车、物流、商超、重工等领域提供的一整套3D视觉解决方案,广泛应用于工件上料、拆码垛、定位装配、货品拣选和质量检测等场景。
梅卡曼德视觉系统通常与工业机器人和协作机器人配合使用。
视觉系统组成
梅卡曼德视觉系统通常由相机、梅卡曼德软件系统、工控机和机器人组成,如下图所示。
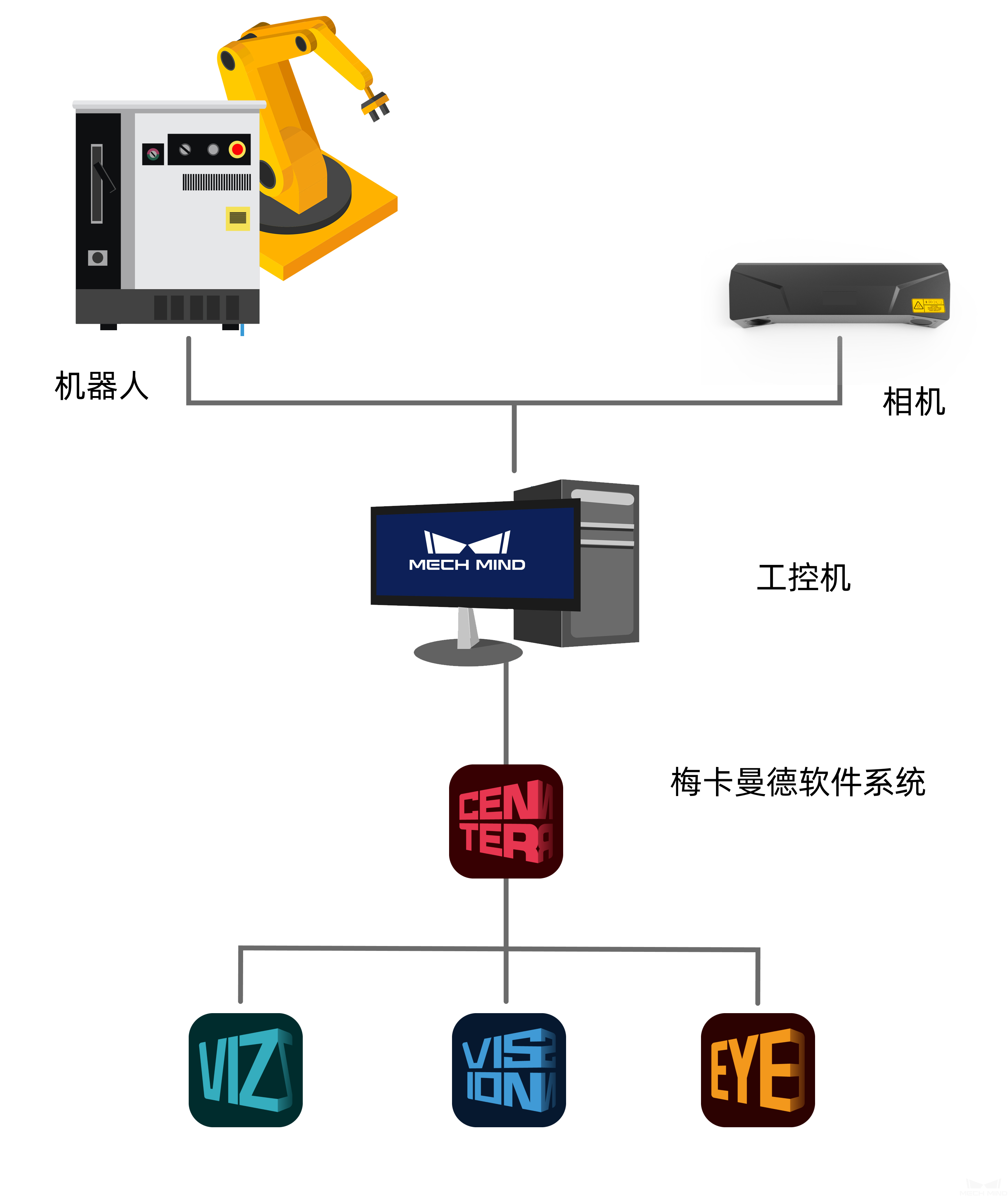
- 相机
-
指梅卡曼德研制的Mech-Eye工业级3D相机,用于采集物体的图像与位置信息。
- 梅卡曼德软件系统
-
梅卡曼德软件系统基于相机采集的图像和位置信息进行视觉处理,输出物体的位置与姿态以及规划的机器人的运动路径,以引导机器人完成智能化任务,如抓取、拆码垛、涂胶、分拣等。
- 工控机
-
指为梅卡曼德软件系统提供运行环境的计算机设备。
- 机器人
-
机器人是一种经过编程的、具有一定自主性的机械装置,可以执行移动、操作或定位等任务。在梅卡曼德视觉系统中,它们按照视觉系统输出的结果执行智能化任务。
|
梅卡曼德软件系统简介
梅卡曼德软件系统是由梅卡曼德自主研发,为机器人及其周边设备提供3D视觉解决方案,主要包含如下软件:
-
Mech-Eye Viewer
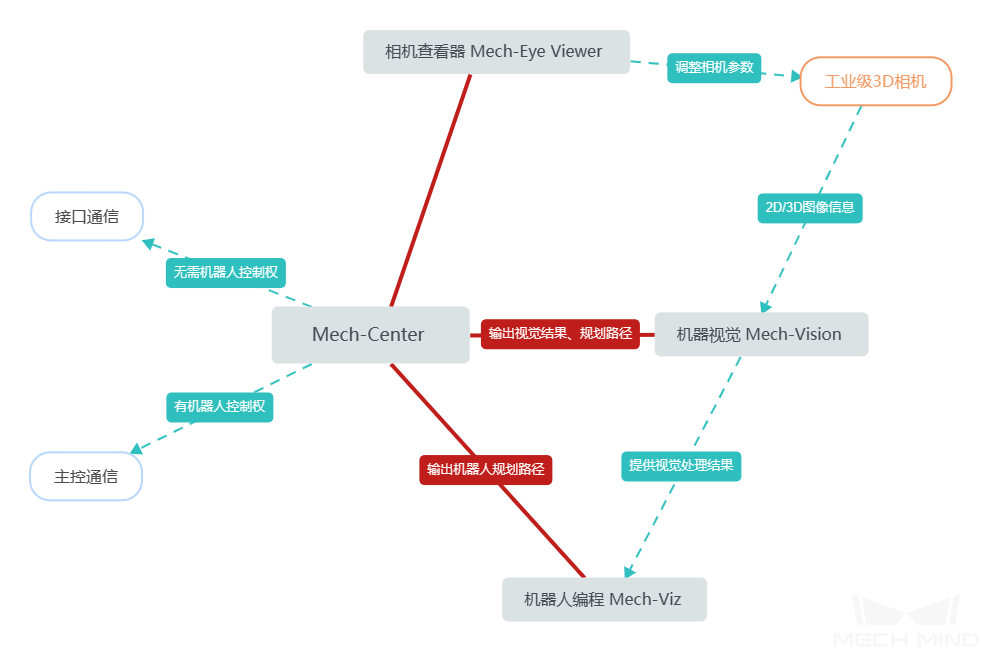
Mech-Eye Viewer允许用户根据目标物体的特性调节Mech-Eye工业级3D相机的参数,从而简单快速地获得高质量的2D图、深度图及点云。

-
Mech-Vision
Mech-Vision机器视觉软件通过完全图形化的界面,无须编写代码即可完成无序物体抓取、高精度定位、装配、工业检测/测量、自动生成路径等先进的机器视觉应用。
该软件基于现场采集的图像数据,进行一系列的视觉算法处理,最终输出视觉结果(例如目标物体的位置和朝向)。该软件还支持对视觉结果进行简单的路径规划,输出机器人的抓取路径。

-
Mech-Viz
Mech-Viz机器人编程软件使用Mech-Vision提供的点云及工件位置信息,智能规划机器人路径,适用于复杂的抓取、搬运、码放等应用场景。
该软件支持以可视化方式搭建机器人的工作流程,并提供3D仿真功能用于机器人实际操作前进行验证操作。该软件已适配国内外众多主流品牌机器人。

-
Mech-Center
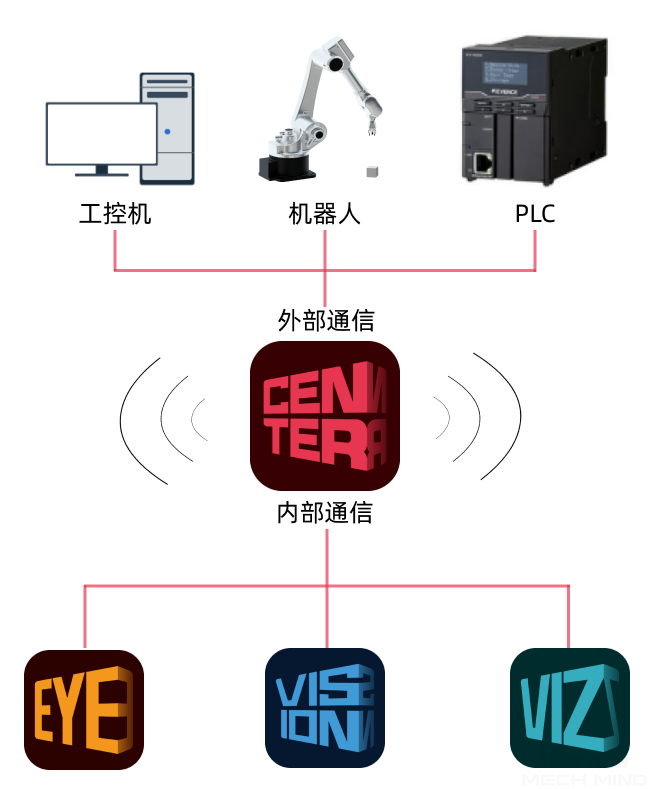
Mech-Center通信枢纽及控制中心,提供标准接口协议,也可帮助客户定制通信服务,从而实现与外部设备间的通信,共同完成视觉引导机器人的智能生产。
在软件系统内部,Mech-Center负责各软件之间的内部通信。例如,它将Mech-Vision输出的视觉处理结果发送给Mech-Viz进行机器人抓取路径规划。在与外部设备间的通信时,Mech-Center将Mech-Vision和Mech-Viz输出的视觉处理结果或规划的机器人运动路径发送给机器人、PLC或者上位机。关于软件系统与外部设备的通信方式参见下文。
梅卡曼德软件系统中各软件之间的关系如下图所示。
与机器人侧通信
为了确保将视觉侧输出的视觉处理结果(Mech-Vision)或者规划的机器人抓取路径(Mech-Vision或Mech-Viz)发送给机器人侧,梅卡曼德软件系统需要能够与机器人侧正常通信。
梅卡曼德视觉系统支持如下通信方式:
-
主控通信
在该方式下,视觉侧拥有对机器人的控制权,即视觉侧作为主站(master)设备,机器人作为从站(slave)设备。视觉侧将控制机器人按照规划的路径执行相应的任务,例如工件上料或拆码垛。
使用该方式时,需要烧录主控程序到机器人上,或通过机器人的SDK(Software Development Kit)获取对机器人的控制权。该方式不支持视觉侧与PLC或上位机之间的通信。
-
接口通信
在该方式下,视觉侧不需要获取机器人的控制权,机器人侧作为主站设备,视觉侧作为从站设备。机器人侧和视觉侧采用同一标准通信协议进行通信,由机器人侧发送请求,视觉侧处理后返回响应。根据请求的不同,视觉侧将返回视觉处理结果或规划的抓取路径。机器人根据视觉侧返回的响应做进一步决策或执行相应的任务。
使用该方式时,需要编写机器人接口程序(用于同视觉侧通信)以及机器人抓取程序(用于接收视觉侧返回的数据以及控制机器人执行任务),并将程序烧录到机器人上。该方式支持视觉侧与机器人、PLC和上位机的通信。
更多关于通信方式的介绍,请参见 通信概述 。