机器人重复精度检查
本节介绍如何进行机器人重复精度检查。
EIH拍照点位置检测
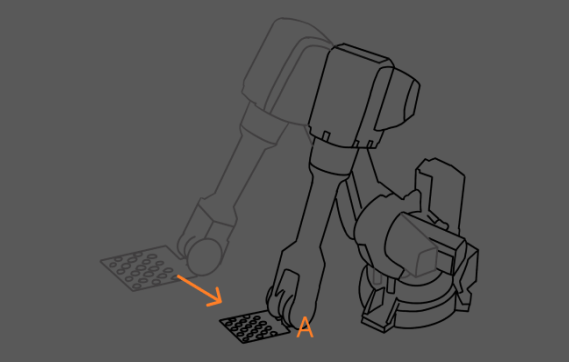
该功能用于检测 EIH 场景下机器人在拍照点的重复精度。如果抓取过程中,机器人到达拍照点时重复精度较差,会导致外参精度较差。
搭建工程获取标定板位姿
-
添加“从相机获取图像”步骤。
新建工程并添加“从相机获取图像”步骤,或选择当前已打开工程的该步骤,在参数区单击选择相机按钮,选择并连接相机。
-
添加“计算标定板位姿并检查相机内参”步骤。
添加“计算标定板位姿并检查相机内参”步骤,并与“从相机获取图像”步骤连接。
-
添加“输出”步骤。
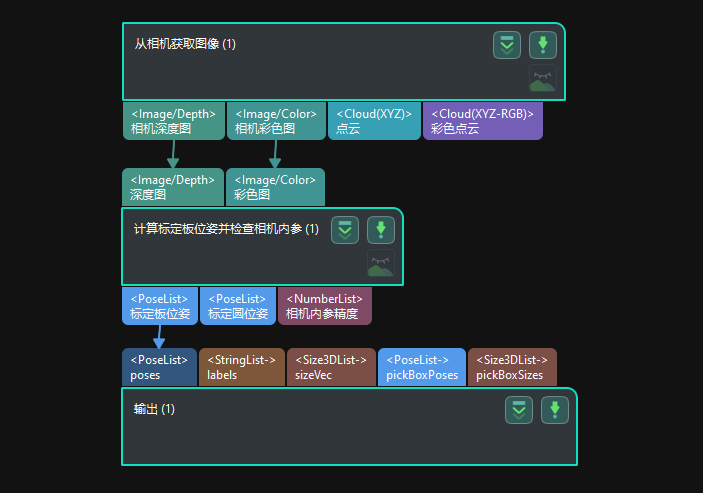
添加“输出”步骤,在“端口类型”参数中选择“自定义”,并在“输出设置助手”窗口勾选“poses”通信键,然后将“计算标定板位姿并检查相机内参”步骤与“输出”步骤连接,用于输出计算后的标定板位姿。
工程搭建完成后,如下图所示。
-
运行工程并查看结果。
运行工程,在底部日志栏中查看标定板位姿的计算结果。
固定抓取点检测
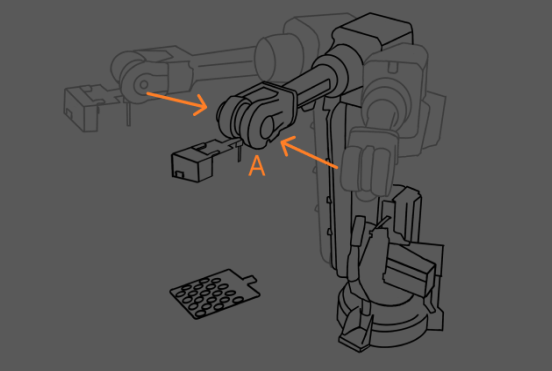
该功能用于检测 ETH 场景下机器人在固定抓取点的重复精度。在 ETH 应用场景中,机器人需要从不同路径点到达固定的抓取点。如果机器人重复精度不够高,可能导致抓取误差。
搭建工程获取标定板位姿
-
添加“从相机获取图像”步骤。
新建工程并添加“从相机获取图像”步骤,或选择当前已打开工程的该步骤,在参数区单击选择相机按钮,选择并连接相机。
-
添加“计算标定板位姿并检查相机内参”步骤。
添加“计算标定板位姿并检查相机内参”步骤,并与“从相机获取图像”步骤连接。
-
添加“输出”步骤。
添加“输出”步骤,在端口类型参数中选择“预定义(视觉结果)”,并将“计算标定板位姿并检查相机内参”步骤与“输出”步骤连接,用于输出计算后的标定板位姿。
工程搭建完成后,如下图所示。
-
运行工程并查看结果。
运行工程,在底部日志栏中查看标定板位姿的计算结果。