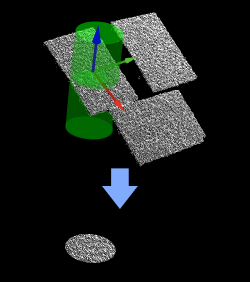
提取圆柱范围内的点云
参数说明
| 参数 | 解释 |
|---|---|
形状类型 |
默认值:空心圆柱体。 值列表:圆柱体、空心圆柱体、扇形柱体。 调节说明:根据不同场景的需要,可以提取不同形状内的点云。选定形状后,将提取此指定形状内的 3D 点云。 |
Z 方向参数
| 参数 | 解释 | 图示 |
|---|---|---|
Z 值下限 |
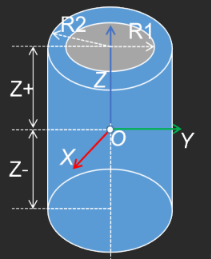
默认值:-100.000 mm 调节说明:此下限为 Z 轴上的最小坐标,对应下图中Z-。单位为毫米(mm)。 |
|
Z 值上限 |
默认值:100.000 mm 调节说明:此上限为 Z 轴上的最大坐标,对应下图中Z+。单位为毫米(mm)。 |
|
圆环和扇形半径参数
| 参数 | 解释 |
|---|---|
内圆半径 |
默认值:50.000 mm 调节说明:XY 平面上的最小距离,对应上图中R1。单位为毫米(mm)。当设置此参数为0时,可以得到一个圆柱体。 |
外圆半径 |
默认值:100.000 mm 调节说明:XY 平面上的最大距离,对应上图中R2。单位为毫米(mm)。 |