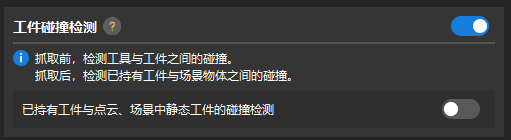
筐内智能路径 您正在查看最新版本(V2.2.1)的文档。如果您想查阅其他版本的文档,可以点击页面右上角“切换版本”按钮进行切换。 ■ 如果您不确定当前使用的产品是哪个版本,请随时联系梅卡曼德技术支持。 工程简介 本样例用于说明如何使用筐内智能路径步骤在单个深筐内抓取散乱堆叠的圆管。Mech-Viz软件可基于料筐及工件模型信息,自动生成机器人进筐抓取工件并退出的路径,有效规避碰撞。 实际应用效果如下: 应用场景 适用于在单个深筐或浅筐内抓取有序或无序工件。 浅筐示例 深筐示例 工作流程说明 使用筐内智能路径步骤的功能搭建范式如下图所示。 工程搭建时的注意事项如下: 需要分别为进筐路径和出筐路径添加筐内智能路径步骤,且筐内智能路径步骤必须与视觉移动步骤相邻。 视觉移动步骤的抓取工艺必须设置为常规抓取。 筐内智能路径步骤不可以位于工作流程末尾,其后必须连接其他路径点确定的移动类步骤。 每个筐内智能路径步骤对应两个路径点。抓取阶段为抓取前时,对应的路径点为入筐点和接近点,抓取阶段为抓取后时,对应的路径点为离开点和出筐点。编写机器人通讯程序时需要注意接收两个路径点。详细说明请参考样例程序。 在抓取阶段为抓取前时,筐内智能路径步骤应和视觉移动步骤相邻,且筐内智能路径步骤位于视觉移动步骤之前。 参数调节说明 筐内智能路径步骤 抓取阶段:位于视觉移动步骤之前的筐内智能路径步骤的抓取阶段必须设置为抓取前,而位于视觉移动步骤之后的筐内智能路径步骤的抓取阶段必须设置为抓取后。 料筐选择:请选择在工程资源树的场景物体中添加的类型为料筐的场景模型。当料筐的位姿或尺寸设置有误,或选择不正确的料筐时,可能会导致路径规划失败,甚至在抓取过程中发生碰撞。 策略模式:详细介绍请参考策略模式。 碰撞检测参数配置 使用筐内智能路径步骤时,必须在碰撞检测功能面板中开启工件碰撞检测。更多碰撞检测相关的调参建议,请参考碰撞检测参数配置。 应用注意事项 若要将此样例应用于实际生产,可参考以下注意事项对工程进行修改和配置,快速投入使用。 关闭视觉记录,通过视觉识别步骤调用相应的Mech-Vision工程来获取视觉结果。 配置场景物体及末端工具模型。 在碰撞检测功能面板中配置各项参数。 该页面是否有帮助? 我要反馈 感谢您的支持! 可以通过以下方式反馈意见: 社区 反馈表单 自动切换工具 常见故障处理