将位姿沿Z轴移动到点云表面
使用场景
该步骤一般用于调整不在物体表面的位姿。此类位姿产生原因包括目标物体倾斜、表面凹陷或凸起等。通常用在计算平面点云的位姿和尺寸步骤之后。
参数说明
可视化设置
| 参数 | 解释 | ||||
|---|---|---|---|---|---|
在选定坐标系下显示点云 |
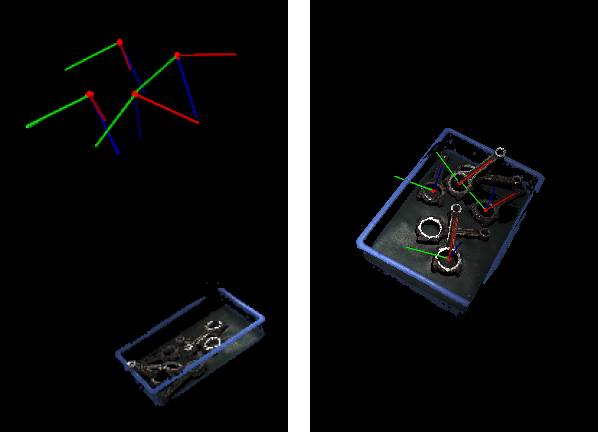
参数解释:在机器人坐标系或相机坐标系下显示点云。 默认值:机器人坐标系 值列表:机器人坐标系、相机坐标系 调节说明:当选择相机坐标系时,调试输出窗口显示相机坐标系下的可视化输出结果;当选择机器人坐标系时,调试输出窗口显示机器人坐标系下的可视化输出结果。具体效果见 调节示例 。
|
||||
位姿显示设置 |
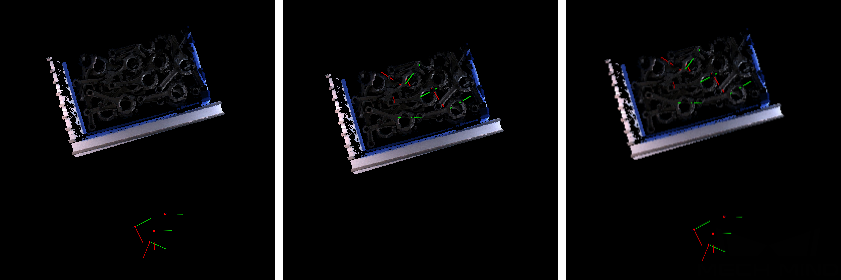
参数解释:该参数用于设置位姿的显示形式。 默认值:只显示输出位姿 值列表:只显示输出位姿、只显示输入位姿、输入与输出一同显示 调节说明:根据实际需求,在下拉列表中选择合适的位姿显示设置。具体效果见 调节示例 。 |
点云获取设置
| 参数 | 解释 |
|---|---|
XOY平面的半径 |
参数解释:该参数用于设置在 XOY 平面上,从位姿原点到搜索范围边界的距离,单位为毫米(mm)。 默认值:5.000 mm。 调节说明:较大的半径会扩大搜索范围,可能包含更多点云数据。较小的半径会缩小搜索范围,可能更精确但也可能找不到足够的点云数据。 |
调整设置
| 参数 | 解释 |
|---|---|
调整设置 |
参数解释:该参数用于设置位姿 Z 轴移动时采用的算法或排序模式。 值列表:
调节说明:不同的调整设置将影响“参考Z轴”和“选用的Z值”参数中可用的选项。 |
参考Z轴 |
参数解释:该参数用于选择计算距离时所参考的坐标系。 值列表:
调节说明:该参数仅在启用“调整设置”时可用。选择不同的参考坐标系将影响位姿与点云的距离计算结果。 |