机器人运动学
本节介绍机器人运动学的基本概念,包括机器人运动方式、正运动学与逆运动学、多解处理及奇异点规避策略。运动学是机器人实现路径规划、位姿控制与视觉引导的理论基础。
正运动学与逆运动学
正运动学与逆运动学互为映射关系:关节角通过正运动学计算映射到工具位姿;工具位姿通过逆运动学计算映射到关节角。
正运动学
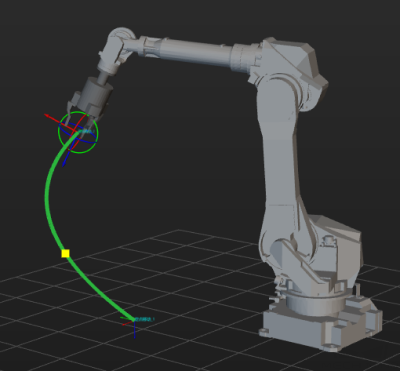
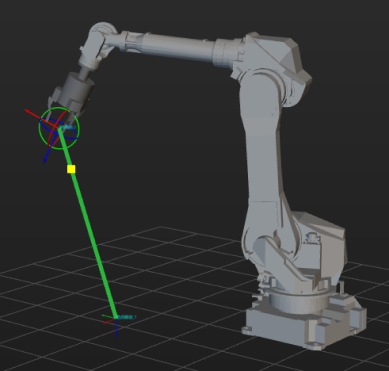
正运动学是根据已知的机器人各关节角度,计算出末端工具(TCP)的空间位姿的过程。在已知各个关节角度的情况下,通过代入机器人构型公式(包含各连杆长度、关节零位和旋转方向等参数),即可唯一确定工具位姿。
在路径规划或运动控制中,若系统以关节角的形式发送运动指令,机器人可直接按照关节角执行运动,因此运动结果与规划结果严格一致。
![][width=500](_images/robot-basics/inverse-kinematics.png)
奇异点
奇异点是指机器人在特定关节位置下,其运动学方程无法求解或失去自由度的状态。在奇异点处,机器人某些方向的运动能力会丧失或无限放大,导致控制不稳定或运动异常。
常见类型
根据出现位置与原因,机器人奇异点通常可以分为以下类型:
-
腕部奇异点
当腕部三个旋转轴共线时出现,导致末端姿态不可控或方向变化剧烈。例如,在六轴机器人中,当第 5 轴角度为 0° 或 180° 时,可能出现腕部奇异点。
-
肘部奇异点
当前臂与上臂在同一直线上时出现,机器人无法确定“肘上”或“肘下”的姿态。可能导致路径规划中多解切换或运动突变。
-
肩部奇异点
当手腕中心与第一关节轴线对齐,或关节轴线发生特定共线关系时产生,使末端在某些方向的运动自由度受限,可能导致相关关节出现大幅度旋转。
在实际工业应用中,最常见的奇异点发生场景是六轴球腕机器人 4 轴和 6 轴接近同轴且进行直线运动时。
奇异点规避
六轴球腕机器人在运动过程中存在固有奇异点。为降低奇异点发生的风险,可采用以下方案解决:
-
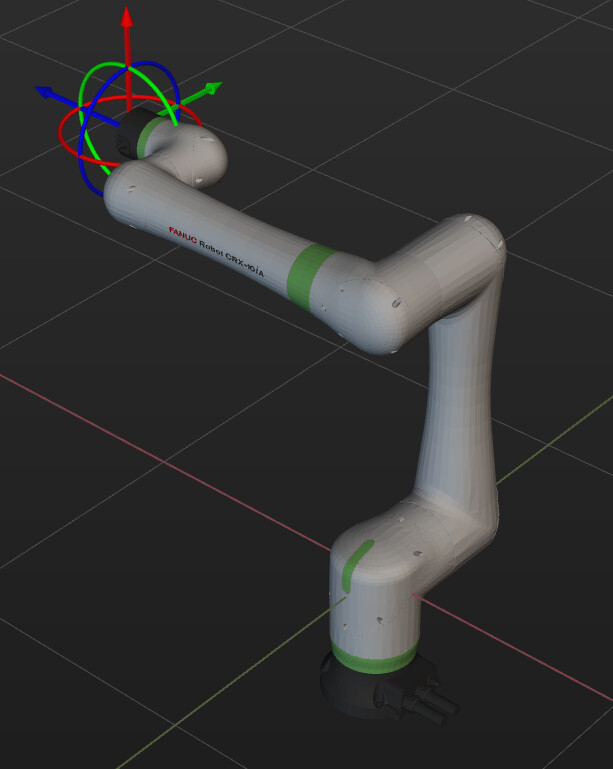
开发偏置腕机器人:通过改变机器人结构避免4、6同轴情况的发生。例如 UR 系列、FANUC CRX 系列。
-
控制器指令优化:增加 moveJ 近似 moveL 的指令,提升执行可行性。
-
软件路径规划调整:Mech-Viz 对可能发生奇异点的路径进行降速处理,并尝试重新规划轨迹。
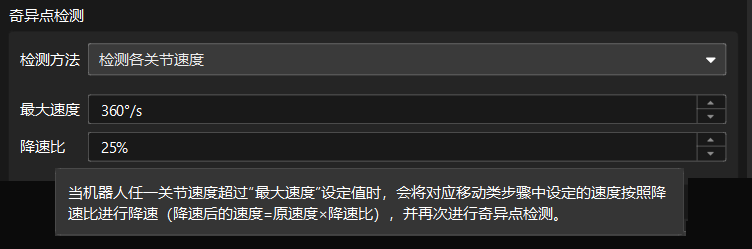
此外,Mech-Viz 支持在路径规划过程中自动检测潜在奇异点,有关奇异点检测的方法,请参考奇异点检测。