提取3D ROI内点云

参数说明
| 参数 | 解释 | 图示 |
|---|---|---|
3D ROI |
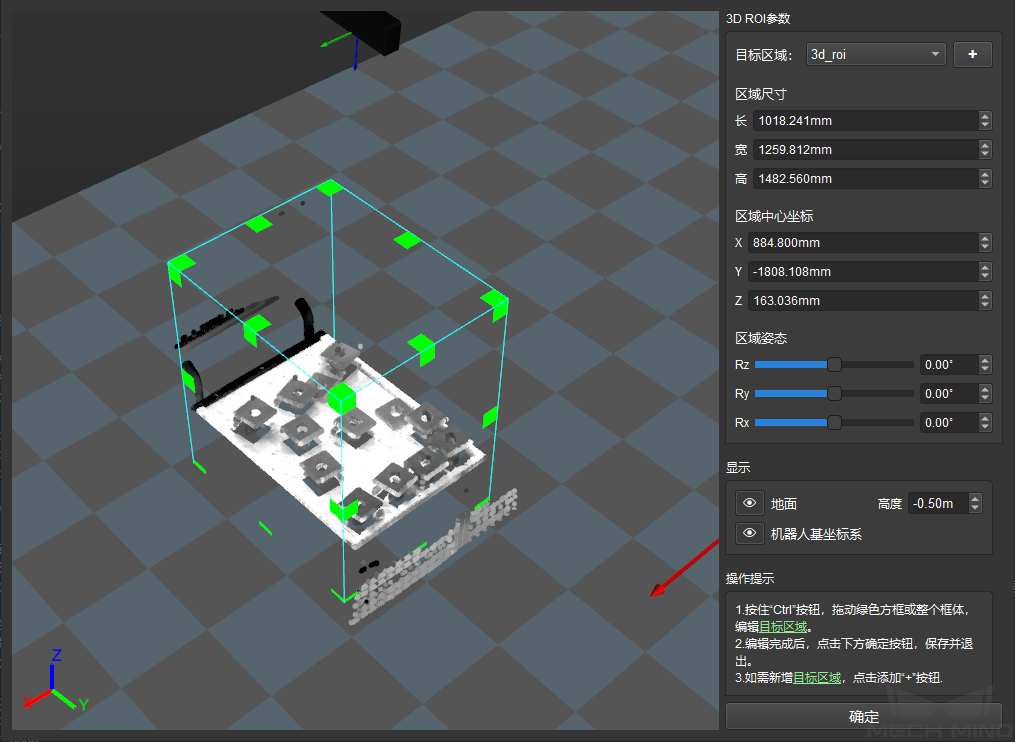
调节说明:单击打开编辑器按钮,在“设置目标区域”窗口中设置 3D ROI。具体操作可参考设置 3D ROI。 |
|
输入点云所在的坐标系类型 |
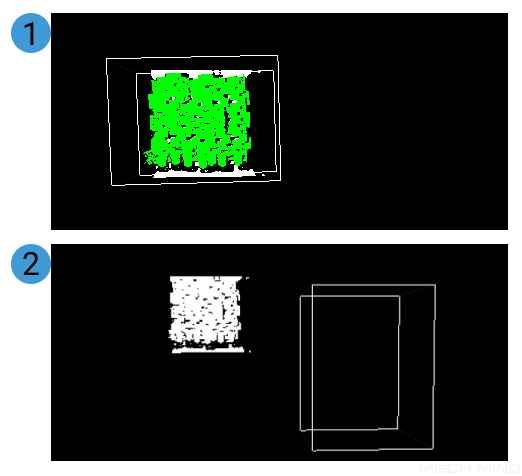
默认值:相机坐标系 值列表:相机坐标系,机器人坐标系 调节说明:更改输入点云所在的坐标系。如右图所示,图 1 为相机坐标系下的输入点云,图 2 为机器人坐标系下的输入点云。 |
|
3D ROI 内最小点数 |
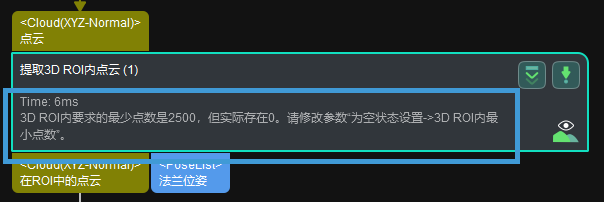
默认值:0 调节说明:该参数用于调整在 3D ROI 中提取 3D 点的数量的最小值。如果在 3D ROI 中提取的 3D 点的数量少于该值,表示截取后的 3D ROI 内点的数量没有满足最小点数要求,此时不返回点云。 |
|
发送 3D ROI 内的点是否为空 |
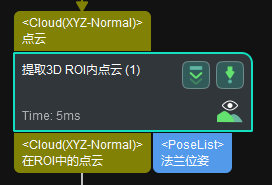
默认值:勾选 调节说明:如果勾选,则发送 3D ROI 中点是否为空白的状态。在默认状态下如果 3D ROI 内的实际点少于“3D ROI 内最小点数”设置的值,则会产生如右图中上图所示的提示。 若不勾选此项则不会有提示,如右图中下图所示。 |
|