点过滤

参数说明
该步骤提供两种过滤点云中的点的方法:
-
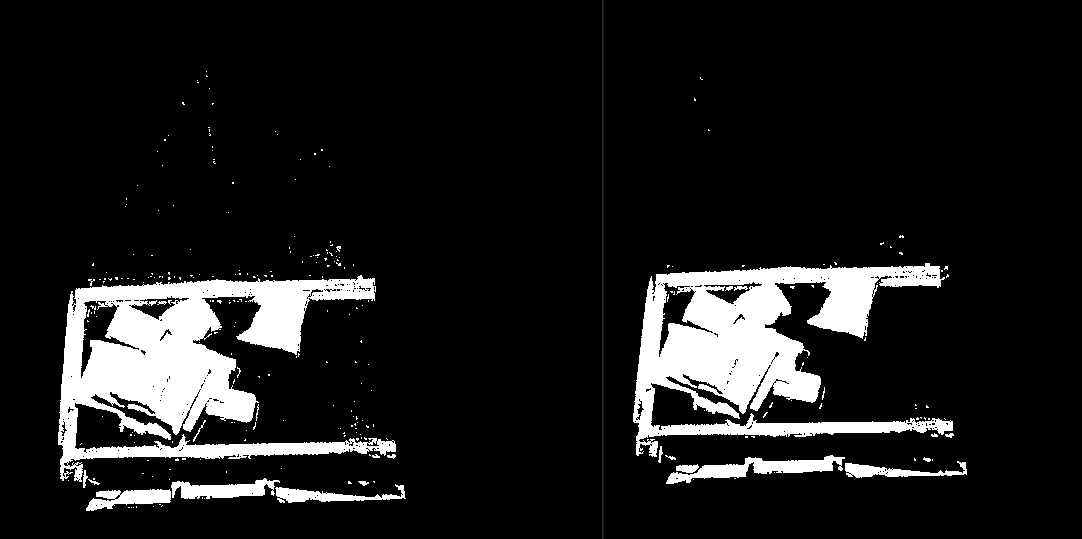
StatisticalOutlierFilter:统计滤波器。根据给定参数,剔除范围外的点。建议在点云有明显离群点时使用,如下图所示。
-
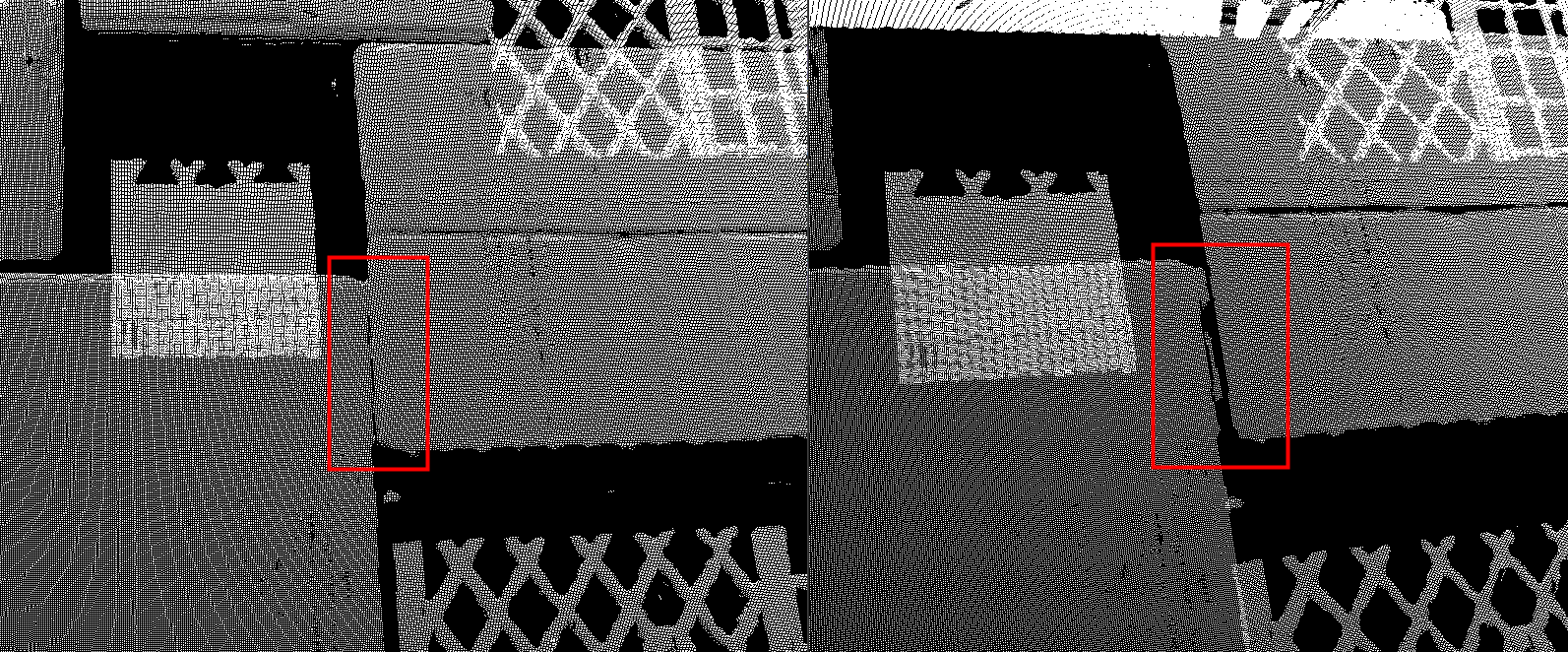
NormalsFilter:法向滤波器。通过给定的参考方向,计算点云中每个点与参考方向的夹角,范围外的点将被过滤。建议在点云需要分层,避免粘连时使用,如下图红框所示。
下文将对两种方法相关的参数进行介绍。
StatisticalOutlierFilter
| 参数 | 解释 | ||
|---|---|---|---|
最近邻近点数 |
参数解释:该参数表示每次搜索的附近点的数目。该值越大,用于计算平均距离值的近邻点的数目越多,点过滤效果越强,但可能过度删除点云细节;该值过小则可能导致点过滤不彻底。 默认值:30 调节说明:推荐使用默认值。 |
||
标准偏差乘数 |
参数解释:该参数表示离群点的判定阈值。该值越小,过滤条件越严格,滤除的点越多;该值越大,过滤条件越宽松,保留的点越多。 默认值:2.0000 调节说明:推荐使用默认值。
|